โครงงานสำหรับคนรักสุขภาพ นำแสงสีต่างๆ ที่มีความหมายแตกต่างกัน ช่วยผ่อนคลายและบำบัดความเครียดจากการทำงานหนักของคนในสังคมเมือง ด้วย Spa lighting ใช้ลอยน้ำให้แสงสี 7 สี “เพียงแค่พลิกฝ่ามือสีก็เปลี่ยน”
การใช้สีบำบัด (Color Therapy)
สมาคมแพทย์ทางเลือกกล่าวไว้ว่าเมื่อยามเจ็บป่วยทำให้จังหวะการทำงานของอวัยวะในร่างกายทำงานผิดปกติ ในขณะที่แสงและสีแต่ละสีก็มีความยาวคลื่นแสงและความถี่ที่แตกต่างกันออกไปและส่งผลโดยตรงต่อการทำงานของระบบประสาทรวมทั้งสามารถช่วยเสริมสร้างจังหวะการทำงานที่ผิดปกติของอวัยวะในร่างกายได้ ดูประโยชน์ของสีแต่ละสีได้จากตาราง
แนวคิดการทำงานของวงจร
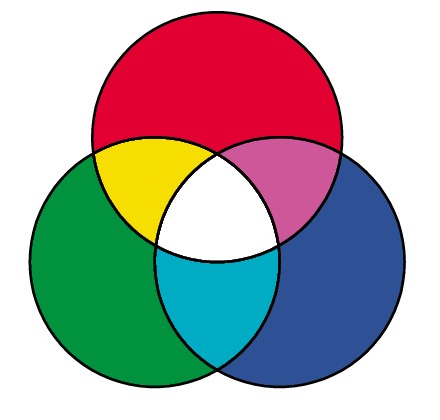
รูปที่ 1 แสดงแม่สีแมื่อวางซ้อนกันจะได้สีต่างๆ
โดย LED ที่เลือกใช้เป็นตัวถังแบบ SMD เบอร์ LRGB9553 (หาซื้อได้ที่ อีเลคทรอนิคส์ ซอร์ส) ที่เลือกใช้ตัวนี้เพราะต้องการความสว่างมากพอสมควร มีมุมกระจายแสงที่กว้าง ขนาดเล็กเพื่อไม่ให้บังแสงไฟที่เกิดขึ้น
ถามถึงวงจรที่เลือกใช้ในครั้งนี้ ไม่ซับซ้อน วุ่นวาย ไม่ต้องใช้ไมโครคอนโทรลเลอร์ ไม่มีโปรแกรมอะไรทั้งนั้น ถ้าเป็นมือใหม่ ก็ใช้ฝีมือประกอบวงจรและบัดกรีให้ถูกต้องก็พอ โดยหัวใจในการทำงานของวงจรเป็นไอซีนับเลขฐานสองเบอร์ CD4040 ตัวเดียวเท่านั้น
เลขฐานสองจะเกี่ยวกับการผสมสีได้ยังไง?
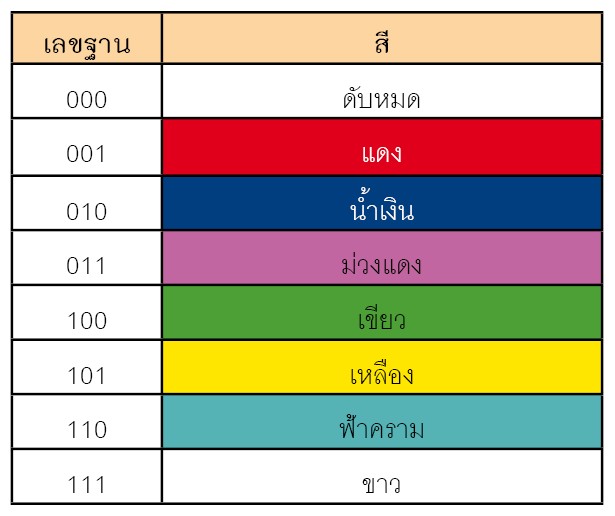
เริ่มจาก 000 ⇒ 001 ⇒ 010 ⇒ 011 ⇒ 100 ⇒ 101 ⇒ 110 ⇒ 111 หลังจากนั้นค่าจะทดไปบิตที่สี่และสามบิตนี้จะวนนับค่านี้ไปเรื่อยๆ สังเกตเห็นอะไรไหมครับ ถ้าแทนตำแหน่งบิตขวาสุดด้วยสีแดง, ตำแหน่งบิตตรงกลางด้วยสีน้ำเงิน และตำแหน่งบิตซ้ายสุดด้วยสีเขียว โดยถ้าตำแหน่งไหนเป็น “0” ก็ไม่มีไฟติด และตำแหน่งที่เป็น “1” ก็ให้ไฟติด ก็จะได้ผลลัพธ์ดังตาราง
ตารางที่ 2 การลำดับค่าของไอซีนับในแต่ละบิต
พอเห็นแบบนี้ ก็จัดการวางวงจรขับ LED ต่อกับไอซี 4040 ได้เลย โดยต่อขา Q1 กับวงจรทรานซิสเตอร์ขับกระแสสำหรับสีแดง, ขา Q2 สำหรับวงจรขับสีน้ำเงิน และ ขา Q3 สำหรับวงจรขับสีเขียว ส่วนขา Q อื่นๆ ไม่ใช้ครับ เพราะเราสนใจแค่ 3 บิตล่างเท่านั้น
รูปที่ 2 วงจร Spa Lighting
หลังรูปแบบการผสมสีเรียบร้อยแล้ว ก็มาดูเรื่องการสั่งงานกันบ้าง ในเมื่อสีของลูกบอลแสงสามารถเปลี่ยนได้ 7 สี และสภาวะไฟดับทั้งหมด รวม 8 ลำดับแล้ว ข้อแม้ในการเปลี่ยนสีของลูกบอลจะเกิดจากการป้อนสัญญาณเข้าไปที่ขา CLK ของไอซี 4040 โดยป้อนสัญญาณลูกหนึ่ง จะเพิ่มค่านับทีละ “1” เช่นกัน โดยขา CLK จะรับสัญญาณจังหวะสัญญาณเปลี่ยนจากลอจิกสูงมาลอจิกต่ำ และเป็นแบบชมิตต์ทริกเกอร์ ซึ่งเหมาะสำหรับรับสัญญาณจากอุปกรณ์ตรวจจับภายนอกได้ดี โดยมีการต่อตัวต้านทานพูลอัปเอาไว้แล้ว
การเปลี่ยนสีของลูกบอล
อย่างนี้ต้องทำให้ใช้ง่าย “แบบพลิกฝ่ามือ“ สิครับ
เซนเซอร์ตรวจจับการพลิกฝ่ามือ? ใช้อะไรดี หาซื้อได้ง่ายมั้ย หรือทำเองได้หรือเปล่า
ตัวตรวจจับที่สามารถเอามาใช้ได้มีหลากหลายแบบครับ ไม่ว่าจะเป็นสวิตช์ปรอท หรือจะเป็นสวิตช์ตรวจจับแรงโน้มถ่วงหรือ Gravity sensor ก็ดี แต่ดีเกินไปสำหรับงานนี้
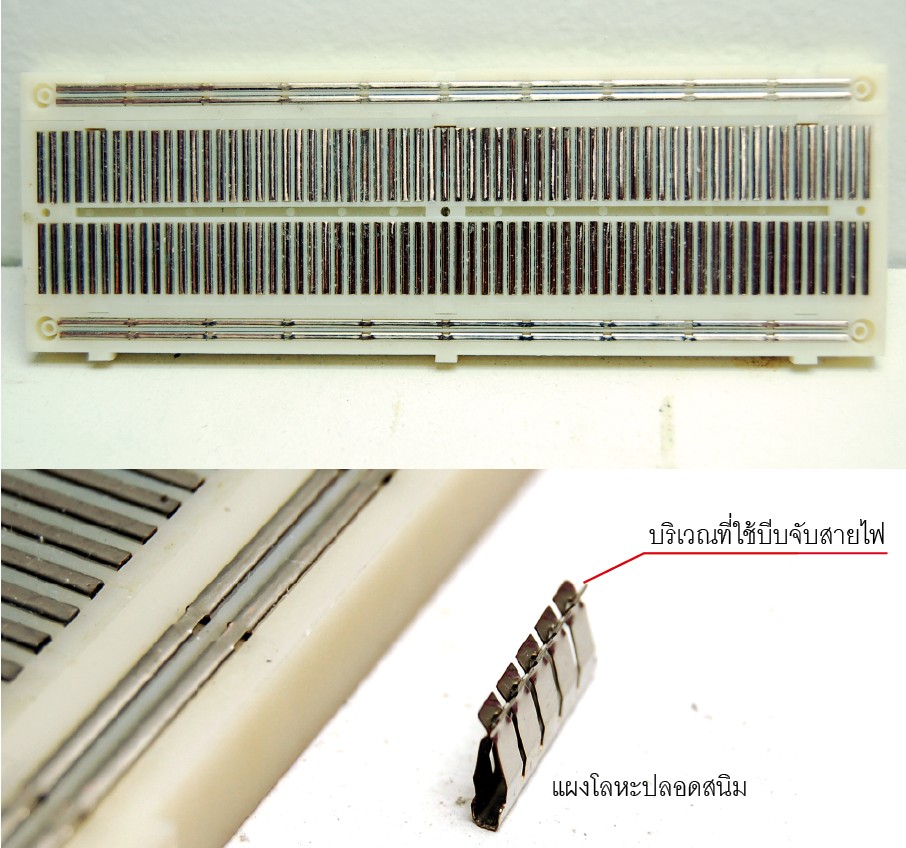
ตัวที่แนะนำคือสวิตช์ตรวจจับระดับแบบลูกเหล็กครับ หลักการจะคล้ายๆ กับสวิตช์ปรอท แต่จะเปลี่ยนจากโลหะปรอทที่เป็นของเหลว เป็นลูกเหล็กกลมๆ แทน เวลาเอียงหรือเขย่า จะได้ยินเสียง กุกๆ กักๆ ให้ความรู้สึกที่ดีว่าเขย่าแล้วและพอหาซื้อได้ในร้านแถวบ้านหม้อ
ในวงจรจะใช้สวิตช์ต่อเข้ากับตัวต้านทาน 220Ω และตัวเก็บประจุ 10µF เพื่อเวลาต่อวงจร เพื่อลดการเกิดบาวซ์ หน้าสัมผัสสวิตช์ ที่จะทำให้เกิดสัญญาณรบกวนและทำงานซ้อนได้ ทำให้การทำงานมีเสถียรภาพมากขึ้น พลิกมือหนึ่งครั้ง จะได้สัญญาณ 1 ลูกแน่นอนมากขึ้น
ดูที่ขาสัญญาณรีเซต จะต่อวงจร RC เพื่อทำหน้าที่ล้างค่านับเป็น 000 ให้ LED ดับ
การประดิษฐ์เซนเซอร์ตรวจจับการพลิกฝ่ามือ
จากนั้นหาเม็ดลูกปืนกลมๆ ขนาดประมาณ 2 ถึง 3 มม. เช็ดให้สะอาด ใส่เข้าไปในรู จากนั้นเจาะรูด้านล่างทะลุตรงกลาง แล้วเอาลวดร้อยปิดไม่ให้ลูกเหล็กหลุดออกมา ลองเขย่าจะต้องมีเสียง และเมื่อเอามิเตอร์วัดที่ปลายลวดสองเส้นด้านบน จะต้องต่อวงจรเมื่อเขย่าลูกเหล็กไปแตะขั้วทั้งสองพร้อมกัน ก็จะได้สวิตซ์ตรวจจับการเขย่า ฝีมือเราเองแล้ว
วงจรภาคจ่ายไฟ
การประกอบสร้างวงจร
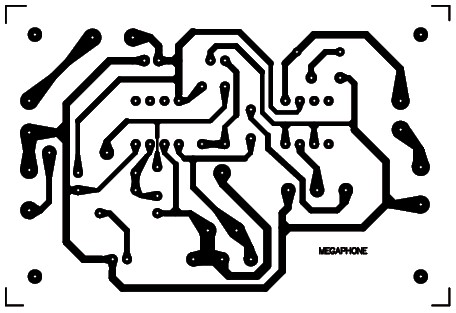
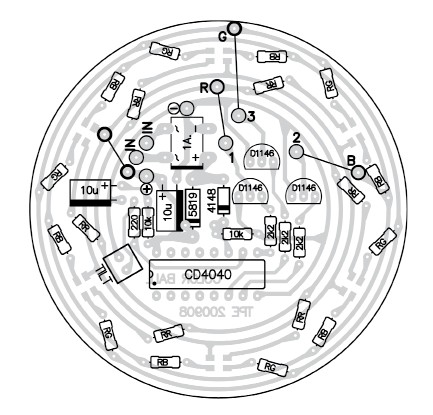
รูปที่ 3 ลายทองแดงของ Spa Lighting (ดาวน์โหลดลายวงจรพิมพ์ขนาดเท่าจริง)
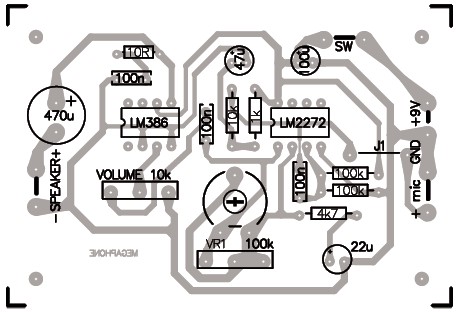
รูปที่ 4 การลงอุปกรณ์ทั่วไปบนแผงวงจร
รูปที่ 5 การติดตั้ง LED และตัวเก็บประจุด้านที่เป็นลายทองแดง
ทรานซิสเตอร์ KTD1146 แนะนำให้เผื่อขาไว้พับ โดยหงายเบอร์ขึ้นด้านบน เพื่อให้ความสูงอุปกรณ์น้อยที่สุด ซึ่งจะเป็นประโยชน์ตอนยึดกะบะถ่านให้ขั้นตอนสุดท้าย
เรื่องค่าตัวต้านทาน RR, RB และ RG นั้น เป็นตัวต้านทานที่จำกัดกระแสไหลผ่าน LED ซึ่งจะเป็นตัวกำหนดความสว่างในแต่ละสี RR เป็นของสีแดง, RB เป็นของสีน้ำเงิน และ RG เป็นของสีเขียว ซึ่งโดยปกติแล้วจะใช้ค่า 220Ω เท่ากันหมด ซึ่งจะให้กระแสไหลผ่าน LED ไม่มากจนเกินไป และได้ความสว่างที่เหมาะกับลูกบอลที่ใช้งาน สำหรับคนที่อยากจะปรับแต่งความสว่างของแต่ละสี ก็สามารถเพิ่มหรือลดค่าความต้านทานได้ตามชอบ แต่ก็ไม่ควรใช้ค่าต่ำกว่า 120W เพราะจะทำให้กระแสไหลผ่านสูงเกินไป จนอาจทำให้ LED ร้อนและเสียหายได้
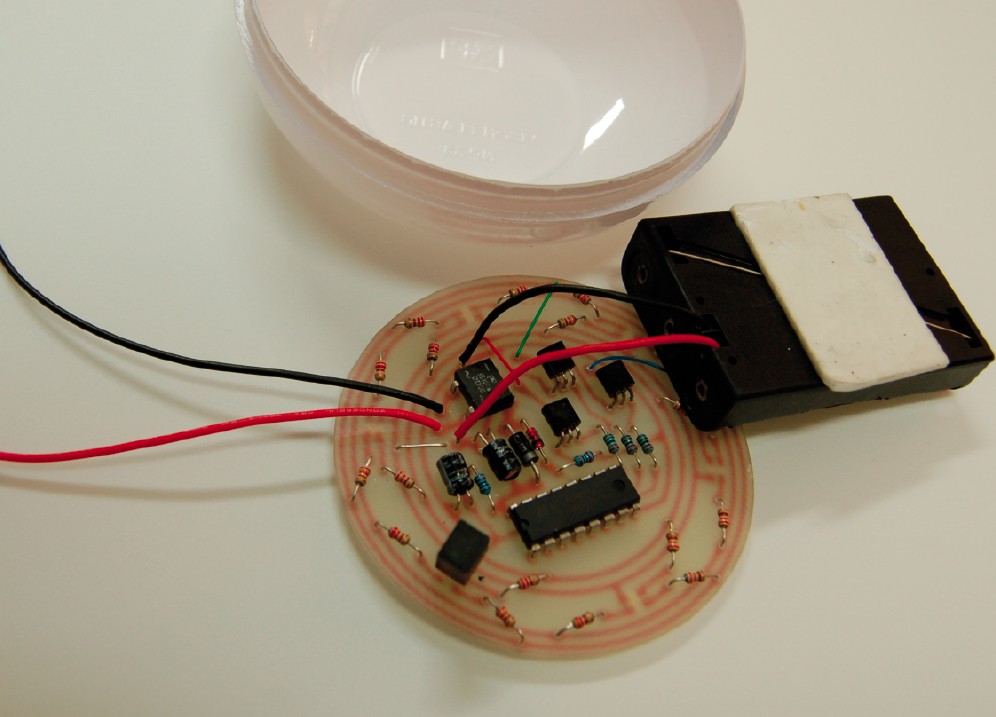
จากนั้นใส่ไดโอดบริดจ์ ดูทิศทางให้ถูกต้อง ต่อสายไฟเชื่อมจุด 1-R , 2-B , 3-G และลวดจัมป์แถวๆ ไฟ + และต่อสายไฟจากกะบะถ่าน และต่อสายไฟที่จุดไฟเข้า เผื่อออกมาไว้ก่อน ดังรูปที่ 5
สังเกตว่าวงจรนี้มีการวางอุปกรณ์สองด้าน อุปกรณ์ส่วนใหญ่วางอยู่ปกติ ส่วน LED LRGB9553 จำนวน 6 ดวง และตัวเก็บประจุ 0.1 µF (ที่อยู่ตรงกลาง) บัดกรีไว้ด้านลายทองแดง การบัดกรี LED แบบ SMD ให้ใช้ความระมัดระวัง เพราะตัวเล็กและต้องดูทิศทางให้ดีก่อนบัดกรีเสมอ สังเกตง่ายๆ ว่า ทิศของมุมบากขา 1 จะเรียงชี้วนตามเข็มนาฬิกา
ส่วนสวิตช์ลูกเหล็กที่ทำไว้ ก็ให้ใส่ด้านอุปกรณ์ตามปกติ แล้วบัดกรีให้เรียบร้อย ตรวจสอบความถูกต้องให้แน่ใจอีกครั้ง หงายแผ่นวงจรให้ LED หันหน้าขึ้นด้านบนก่อน
การทดสอบ
การทำลูกบอลสำหรับใส่วงจร
รูปที่ 6 การทำสีให้เป็นบอลสปา
รูปที่ 7 ทำสีเสร็จแล้วพร้อมประกอบ
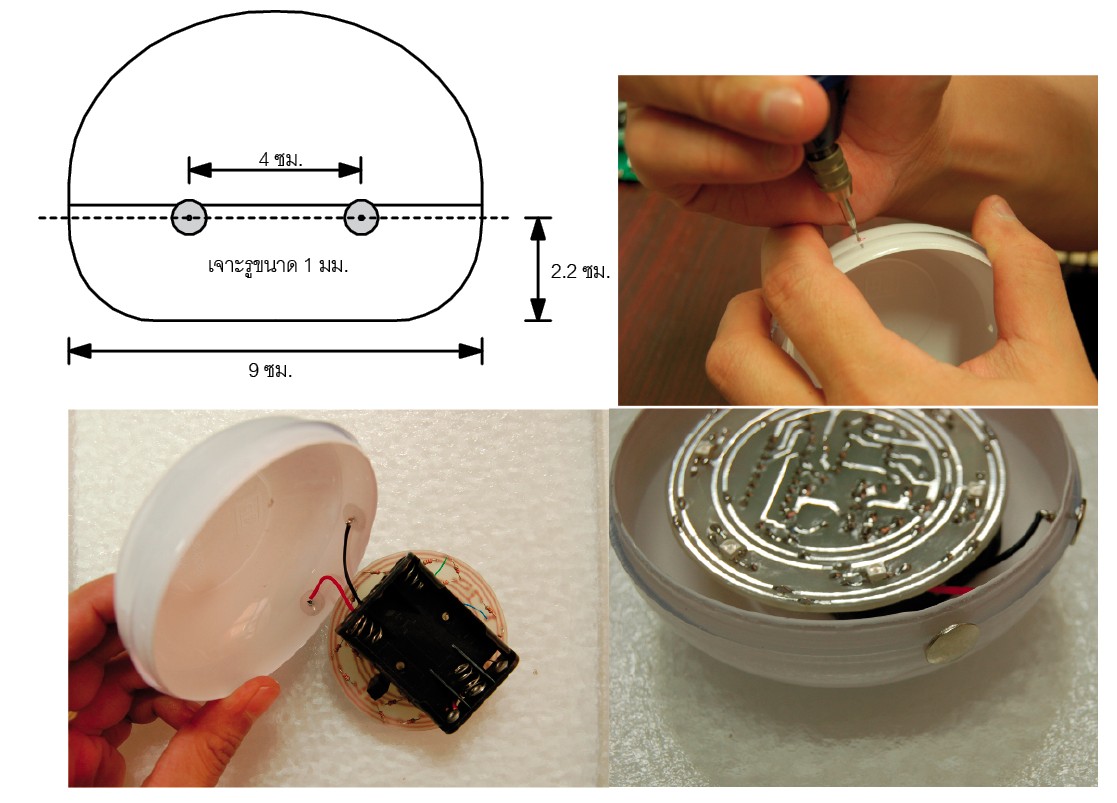
เมื่อได้บอลที่ทำสีแล้ว ให้เจาะรูขนาดเส้นผ่าศูนย์กลาง 1 มม. ที่ฝาด้านล่างดังรูปที่ 10 จำนวน 2 รู โดยเจาะห่างกันประมาณ 4 ซ.ม. เพื่อใส่ตะปูเป๊กเป็นจุดต่อกับชุดวงจรประจุไฟ ที่เรากำลังจะทำในขั้นต่อไปแล้วใช้กาวร้อน กาวแท่ง หรือกาวยางติดยึดตะปูและอุดรูกันน้ำให้เรียบร้อย แล้วบัดกรีต่อสายไฟเข้ากับแผ่นวงจร ทดสอบวงจรของลูกบอลอีกครั้งว่าไฟยังคงทำงานถูกต้องทุกสี ทุกหลอด แล้วถอดแบตเตอรี่ออกก่อน
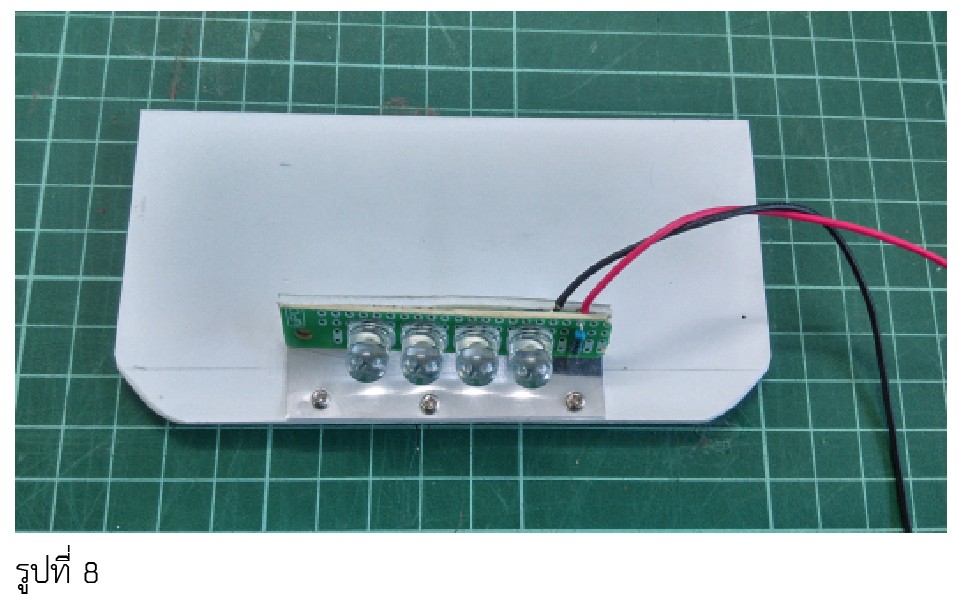
รูปที่ 8 เจาะรูเพื่อติดตะปูเป็กสำหรับเป็นจุดประจุแบตเตอรี่
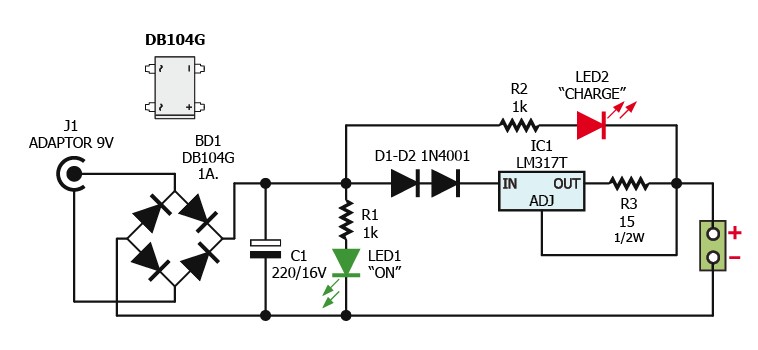
วงจรประจุไฟให้บอลแสง
I set = 1.2 / RS
ในที่นี้ RS มีค่า 15W กระแสที่จ่ายได้มีค่าประมาณ 80mA. ถ้าคิดคร่าวๆ การประจุแบตเตอรี่ AAA ความจุ 800 mAh ได้เต็ม จะใช้เวลาประมาณ 10 ชั่วโมงนั่นเอง แต่ถ้าใจร้อน ก็สามารถลดค่า RS ลงได้ เพื่อให้กระแสไฟออกมากขึ้น แต่ก็จะทำให้ไอซี LM317T ร้อนมากขึ้นและต้องติดแผ่นระบายความร้อนเพิ่มเติมด้วย แต่อย่างไรก็ตามไม่ควรตั้งค่ากระแสไฟออกมากกว่า 200mA เพราะจะทำให้เกิดความร้อนมากทั้งตัววงจรประจุและแบตเตอรี่ที่อยู่ในลูกบอลด้วย รวมถึงวงจรนี้ไม่ได้ออกแบบให้ตัดไฟเมื่อประจุเต็มแล้ว ทำให้ถ้ายังคงจ่ายกระแสต่อไปอย่างต่อเนื่องเป็นเวลานาน อายุการใช้งานของแบตเตอรี่อาจจะเสื่อมเร็วกว่าปกติได้ ส่วน LED สีเขียว จะแสดงสถานะให้ทราบว่ามีไฟเข้า และไฟ LED สีแดงจะติดเมื่อมีการต่อลูกบอลเข้ากับจุดต่อไฟครบวงจรและเริ่มการประจุไฟ
รูปที่ 9 วงจรประจุแบตเตอรี่ของลูกบอลแสง
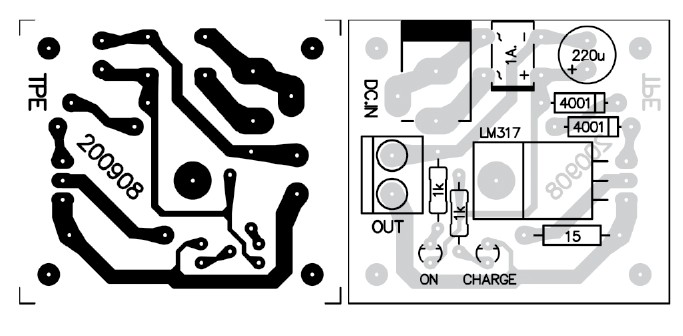
รูปที่ 10 ลายทองแดงและการวางอุปกรณ์ของวงจรชาร์จ (ดาวน์โหลดลายวงจรพิมพ์ขนาดเท่าจริง)
สร้างแท่นยึดวงจรประจุไฟและรองรับการวางของบอลแสง
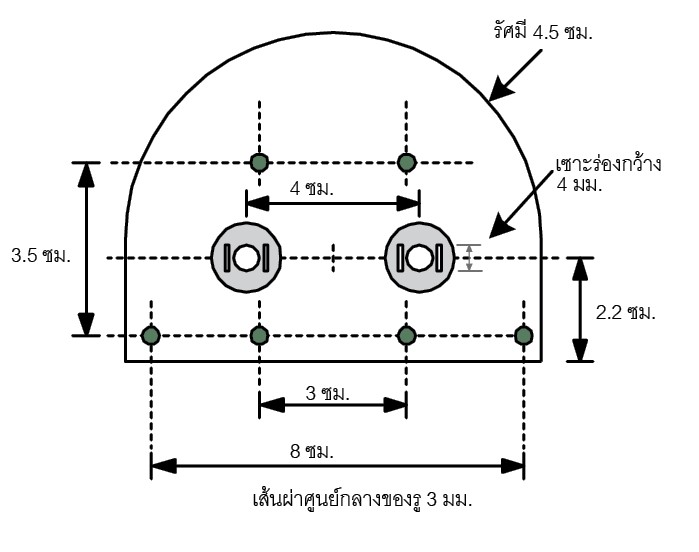
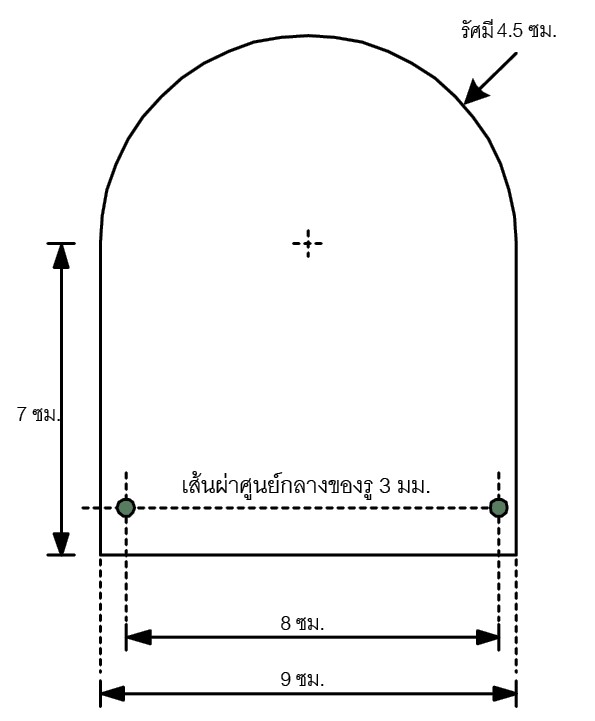
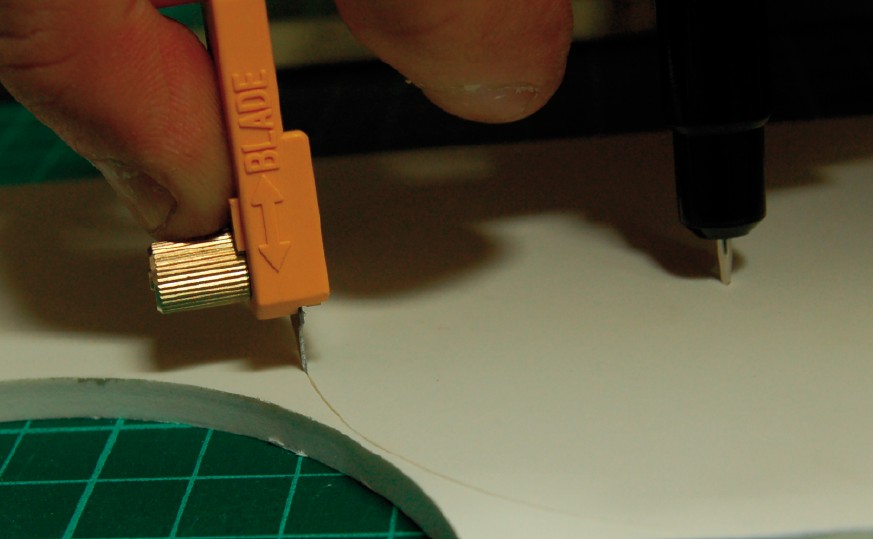
รูปที่ 11 ตัดแผ่นพลาสวูดตามแบบจำนวน 2 ชิ้นส่วนโค้งตัดด้วยวงเวียนใบมีด ยี่ห้อ OLFA สำหรับทำโครงสร้างของแท่นวงจรประจุไฟลูกบอลแสง
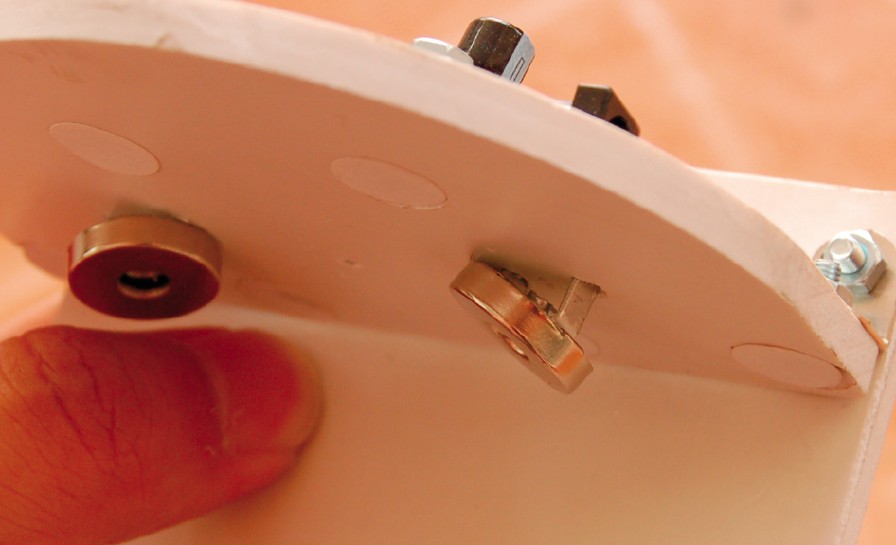
ทำการบัดกรีวงจรให้เรียบร้อย ต่อสายไฟออกไปยังกระดุมแม่เหล็กที่เจาะยึดไว้กับแผ่นพลาสวูด แล้วนำฉากเหล็กตัวจิ๋วที่ซื้อมาจากโฮมโปร ยึดสกรูเกลียวปล่อยเข้ากับฐานอีกทีหนึ่งดังรูปที่ 12 จากนั้นเสียบสายอะแดปเตอร์ 9 Vdc เข้าไป จะต้องเห็น LED สีเขียวติด และเมื่อนำลูกบอลที่ใส่แบตเตอรี่แบบประจุได้ มาเขย่าให้ LED ติดสีไหนก็ได้ โดยการหันด้านตะปูเป๊กดูดติดกับจุดกระดุมแม่เหล็กทั้งสองจุด LED ของลูกบอลจะต้องดับลง และ LED สีแดงที่แสดงสถานะ CHARGE จะต้องติดสว่างขึ้นมา เป็นอันใช้ได้
ตรวจสอบการทำงานทั้งหมดให้แน่ใจอีกครั้ง แล้วขันสกรู รองเสารองพลาสติก ยึดวงจรประจุไฟเข้ากับฐานให้เรียบร้อย อาจจะหาแผ่นสติ๊กเกอร์ปิดช่องขันสกรูให้ดูเรียบร้อยมากขึ้น และหากลูกยางรองฐานให้ดูมั่นคงมากขึ้น
รูปที่ 12 ประกอบแผ่นพลาสวูดที่ตัดแล้ว 2 ชิ้นเข้าด้วยกัน
ผนึกลูกบอลขั้นสุดท้าย
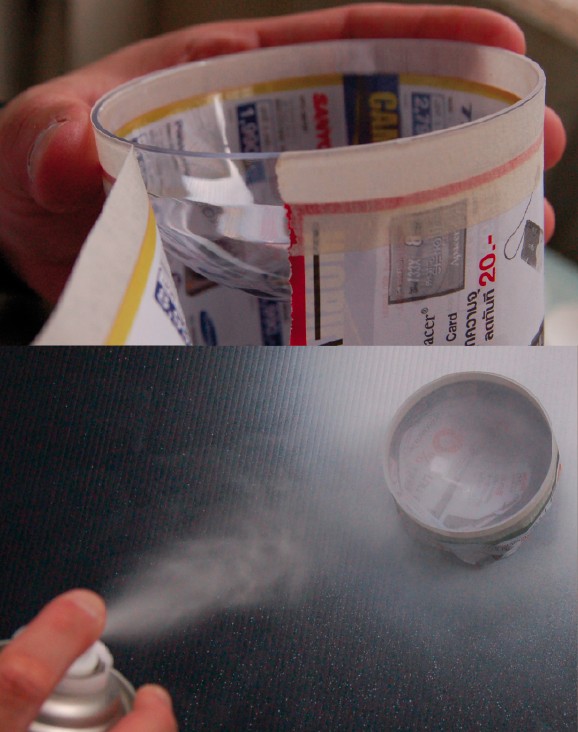
รูปที่ 13 การผนึกลูกบอลแสงให้กันน้ำได้
จากนั้น บีบกาวซิลิโคนลงไปตามร่องแล้วใช้นิ้วมือปาดซ้ำลงไปให้เนื้อกาวซิลิโคนอัดแน่นลงไปในร่องจนรอบลูกบอล วิธีนี้จะช่วยให้กันน้ำได้ดี เพราะซิลิโคนมีคุณสมบัติที่เหนียวและยืดหยุ่นตัวได้ดี
เมื่อปาดกาวซิลิโคนจนรอบลูกบอลแล้ว ให้ดึงเทปกาวที่คาดกันไว้ออกทันที ไม่ต้องรอจนกาวซิลิโคนแห้ง เพราะจะทำให้ลอกออกยาก จากนั้นปล่อยให้เนื้อกาวซิลิโคนแห้งสนิทประมาณ 4 ถึง 5 ชั่วโมงเป็นอันเสร็จพร้อมนำไปใช้งานในอ่างน้ำที่บ้านได้ทันที
การนำไปใช้งาน
**********************************************รายการอุปกรณ์ลูกบอลแสง
*******************************************************รายการอุปกรณ์วงจรประจุแบตเตอรี่