โดย : ชัยวัฒน์ ลิ้มพรจิตรวิไล
ทบทวนความรู้พื้นฐานสำหรับเมกเกอร์ นักเล่น นักทดลอง รู้จักกับองค์ประกอบของสัญญาณไฟฟ้าที่หลายคนอาจไม่เคยรู้หรือลืมไปแล้ว
ความรู้พื้นฐานทางอิเล็กทรอนิกส์ยังคงมีความสำคัญ เหล่าเมกเกอร์ นักเล่น นักทดลองวงจรและโครงงานด้านอิเล็กทรอนิกส์สมัยใหม่ควรให้ความใส่ใจ และทำความเข้าใจตามสมควร ทั้งนี้เนื่องจากเวลาเกิดปัญหาในการทดลองหรือทำโครงงาน การใช้เครื่องมือเพื่อวัดสัญญาณเป็นสิ่งจำเป็น ดังนั้นความเข้าใจในเรื่องเกี่ยวกับสัญญาณไฟฟ้าจึงเป็นสิ่งที่ควรรู้ จึงนำมาเสนอเพื่อเติมข้อมูลให้แก่เหล่าเมกเกอร์ร่วมสมัยและเป็นการปัดฝุ่นทบทวนความรู้สำหรับเมกเกอร์รุ่นใหญ่ไปพร้อมกัน
สัญญาณพัลส์คืออะไร ?
สัญญาณพัลส์ (pulse) ใช้ในการอธิบายปรากฏการณ์ที่ระดับของสัญญาณไฟฟ้าเกิดการเปลี่ยนแปลงจากระดับหนึ่งไปสู่อีกระดับหนึ่งที่มีความแตกต่างกันมากๆ อย่างรวดเร็ว อาจมีความต่อเนื่องหรือไม่ก็ได้ ส่วนประกอบของสัญญาณพัลส์ที่สำคัญได้แก่ ระดับสัญญาณหรือแอมปลิจูด (amplitude) , ขอบขาของสัญญาณ ซึ่งมีด้วยกัน 2 ลักษณะคือ ขอบขาขึ้น (rising edge) และขอบขาลง (falling edge), ความกว้างของสัญญาณ (pulse width) และเส้นฐาน (basedline) ดังแสดงรายละเอียดของส่วน ประกอบที่สำคัญของพัลส์ในรูปที่ 1

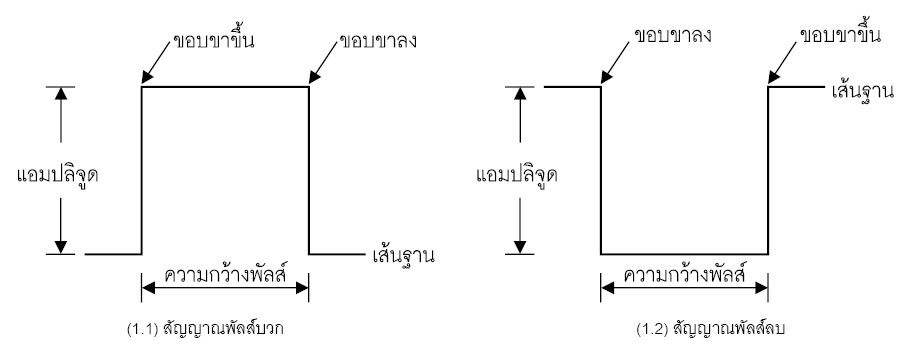
รูปที่ 1 แสดงส่วนประกอบของสัญญาณพัลส์
ลักษณะของสัญญาณพัลส์จะมีทั้งพัลส์บวก (รูปที่ 1.1) และพัลส์ลบ (รูปที่ 1.2) ขอบขาขึ้นของสัญญาณ หมายถึง ขอบขาของสัญญาณที่เปลี่ยนระดับจากต่ำไปยังระดับสูง ส่วน ขอบขาลงของสัญญาณ หมายถึงขอบขาของสัญญาณที่เปลี่ยนระดับจากสูงลงมายังระดับต่ำ ส่วนแอมปลิจูดจะคำนวณหรือวัดจากระดับสัญญาณต่ำมายังระดับสัญญาณสูง หรือจากยอดของสัญญาณมายังเส้นฐานของสัญญาณพัลส์
พารามิเตอร์ที่สำคัญของสัญญาณพัลส์
สัญญาณพัลส์ในอุดมคติเป็นรูปสี่เหลี่ยมที่คมชัด แต่ในความเป็นจริง สัญญาณพัลส์ที่เกิดขึ้น อาจไม่เหมือนกับสัญญาณพัลส์ในอุดมคติ ทั้งนี้เนื่องจากการทำงานของอุปกรณ์อิเล็กทรอนิกส์ในบางประเภทมีความเร็วในการทำงานหรือตอบสนองต่อสัญญาณพัลส์ได้ไม่เร็วเพียงพอ ทำให้เกิดช่วงเวลาก่อนที่ระดับสัญญาณจะเปลี่ยนแปลงสู่ระดับที่มีเสถียรภาพ ในรูปที่ 2 แสดงสัญญาณพัลส์ที่เกิดขึ้นจริงในทางปฏิบัติ และพารามิเตอร์ที่สำคัญของสัญญาณพัลส์

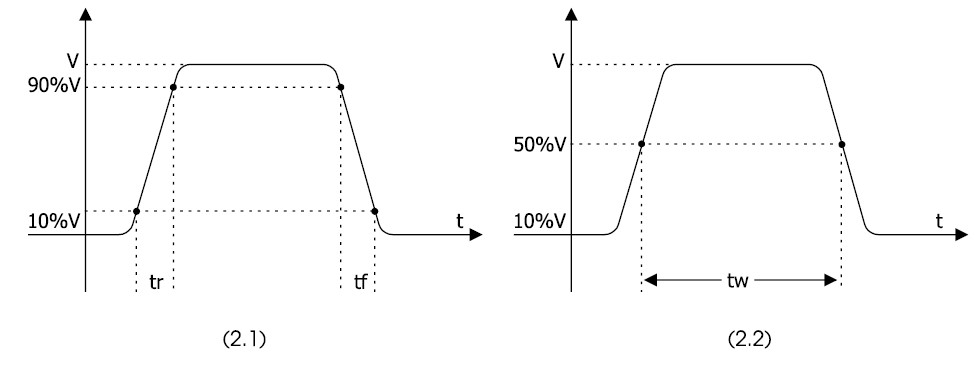
รูปที่ 2 แสดงพารามิเตอร์ที่สำคัญของสัญญาณพัลส์
พารามิเตอร์ที่สำคัญของสัญญาณพัลส์ ซึ่งเป็นตัวบ่งบอกถึงคุณภาพของสัญญาณ ประกอบด้วย
1. ช่วงเวลาไต่ขึ้น (rise time : tr) เป็นค่าของเวลาที่สัญญาณเกิดการเปลี่ยนแปลงจากระดับ 10% ของสัญญาณสูงสุดไปยังระดับ 90% ของสัญญาณสูงสุด หรืออาจกล่าวได้ว่า เป็นช่วงเวลาของการเกิดขอบขาขึ้นของสัญญาณ ดังแสดงในรูปที่ 2.1
2. ช่วงวลาไต่ลง (fall time : tf) เป็นค่าของเวลาที่สัญญาณเกิดการเปลี่ยนแปลงจากระดับ 90% ของสัญญาณสูงสุดลงมายังระดับ 10% ของสัญญาณสูงสุด หรืออาจกล่าวได้ว่า เป็นช่วงเวลาของการเกิดขอบขาลงของสัญญาณ ดังในรูปที่ 2.1
3. ความกว้างของพัลส์ (pulse width : tw) เป็นค่าของเวลาระหว่างจุดระดับ 50% ที่ขอบขาขึ้นของสัญญาณกับจุดระดับ 50% ที่ขอบขาลงของสัญญาณ ดังในรูปที่ 2.2
สัญญาณพัลส์ต่อเนื่อง (Repetitive pulse)
สัญญาณพัลส์ปกติอาจมีเพียงลูกเดียวเรียกว่า พัลส์เดี่ยว (single pulse) แต่ถ้าหากพัลส์ที่เกิดขึ้นมีความต่อเนื่องและเกิดคาบเวลาคงที่ (periodic) จะเรียกพัลส์ที่เกิดขึ้นว่า พัลส์ต่อเนื่อง ซึ่งจะมีลักษณะเหมือนกับสัญญาณรูปสี่เหลี่ยม (rectanular waveform) แต่จะแตกต่างกันตรงที่สัญญาณสี่เหลี่ยมจะมีดิวตี้ไซเกิล 50% นั่นคือสัญญาณในซีกบวกจะมีความกว้างเท่ากับสัญญาณในซีกลบ แต่ถ้าเป็นสัญญาณพัลส์ต่อเนื่องจะมีดิวตี้ไซเกิลที่อิสระ ดังแสดงในรูปที่ 3

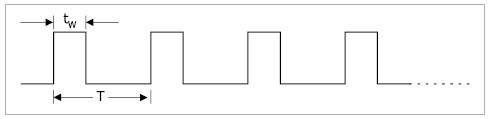
รูปที่ 3 แสดงลักษณะของพัลส์ต่อเนื่อง
ดิวตี้ไซเกิลของสัญญาณพัลส์ต่อเนื่องสามารถคำนวณได้จาก
โดยที่ tw คือ ความกว้างของพัลส์ และ T คือ คาบเวลาของสัญญาณพัลส์ 1 ลูก
นั่นหมายความว่า ความถี่จะไม่มีผลต่อการปรับหรือเปลี่ยนแปลงดิวตี้ไซเกิลแต่อย่างใด ในรูปที่ 4 แสดงสัญญาณพัลส์ที่มีดิวตี้ไซเกิลแตกต่างกัน ในขณะที่ความถี่ของสัญญาณไม่เปลี่ยนแปลง

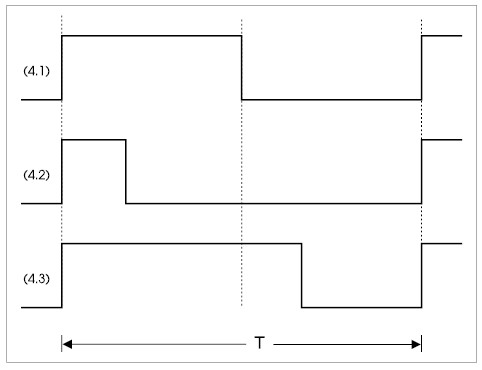
รูปที่ 4 แสดงลักษณะของสัญญาณพัลส์ที่มีค่าดิวตี้ไซเกิลแตกต่างกันแต่มีความถี่เท่ากัน
ค่าแรงดันเฉลี่ยของสัญญาณพัลส์
ค่าแรงดันเฉลี่ย (Vavg) ของสัญญาณพัลส์มีค่าเท่ากับผลรวมของระดับสัญญาณที่เส้นฐานกับผลคูณระหว่างค่าดิวตี้ไซเกิลกับแอมปลิจูด
ตัวอย่างการคำนวณหาค่าแรงดันเฉลี่ยของสัญญาณพัลส์
จงคำนวณหาค่า Vavg ของสัญญาณพัลส์ทั้งสามแบบในรูปที่ 5
(ก) ระดับแรงดันเส้นฐานของสัญญาณพัลส์จากรูปที่ 5.1 เท่ากับ 0V แอมปลิจูด 2V ดิวตี้ไซเกิลมีค่าเท่ากับ 1/10 x 100% = 10% ดังนั้นแรงดันเฉลี่ยมีค่าเท่ากับ
Vavg = ระดับแรงดันเส้นฐานของสัญญาณ พัลส์ + (ดิวตี้ไซเกิล x แอมปลิจูด)
= 0 + (10% x 2) = 0.2V
(ข) ระดับแรงดันเส้นฐานของสัญญาณพัลส์จากรูปที่ 5.2 เท่ากับ +1V แอมปลิจูด 5V ดิวตี้ไซเกิลมีค่าเท่ากับ 1/2 x 100% = 50% แรงดันเฉลี่ยมีค่าเท่ากับ
Vavg = ระดับแรงดันเส้นฐานของสัญญาณ พัลส์ + (ดิวตี้ไซเกิล x แอมปลิจูด)
= 1 + (50% x 5) = 1 + 2.5 = 3.5V
(ค) ระดับแรงดันเส้นฐานของสัญญาณพัลส์จากรูปที่ 5.3 เท่ากับ -1V แอมปลิจูด 2V ดิวตี้ไซเกิลมีค่าเท่ากับ 10/20 x 100% = 50% แรงดันเฉลี่ยมีค่าเท่ากับ
Vavg = ระดับแรงดันเส้นฐานของสัญญาณพัลส์+(ดิวตี้ไซเกิล x แอมปลิจูด)
= -1 + (50% x 2)
ในสัญญาณพัลส์รูปที่ 5.3 เป็นสัญญาณพัลส์ไฟสลับ ดังนั้นแรงดันเฉลี่ยของสัญญาณเต็มรูปคลื่นจึงเป็นศูนย์

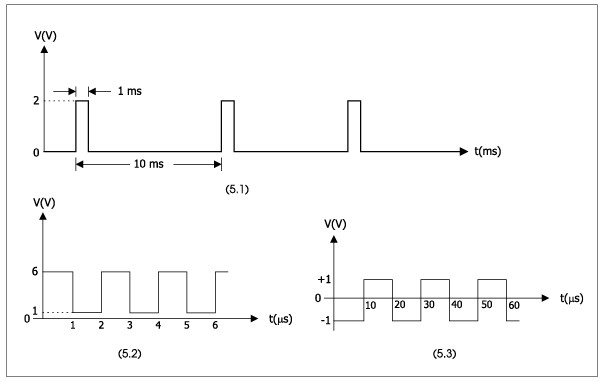
รูปที่ 5 ตัวอย่างของสัญญาณพัลส์รูปแบบต่างๆ ที่นำมาคำนวณหาค่าแรงดันเฉลี่ย
สัญญาณสามเหลี่ยม (Triangular waveform)
เป็นสัญญาณไฟฟ้าอีกแบบหนึ่งที่เกิดจากการเปลี่ยนแปลงของระดับสัญญาณในลักษณะลาดเอียงหรือเรียกว่า แรมป์ (ramp) หากสัญญาณลาดเอียงขึ้นจากระดับต่ำไปสูงเรียกว่า แรมป์บวก (positive ramp) ถ้าหากสัญญาณลาดเอียงจากระดับสูงลงมาต่ำ เรียกว่า แรมป์ลบ (negative ramp) อัตราการเปลี่ยนแปลงในลักษณะลาดเอียงสามารถ คำนวณได้จาก ระดับสัญญาณหารด้วยเวลารวมของการเปลี่ยนแปลงระดับสัญญาณ จึงมีหน่วยเป็น โวลต์หรือแอมแปร์ต่อวินาที (V/s; A/s) แล้วแต่ว่าสัญญาณที่นำมาพิจารณาเป็นสัญญาณของแรงดันหรือกระแสไฟฟ้า ดังแสดงในรูปที่ 6

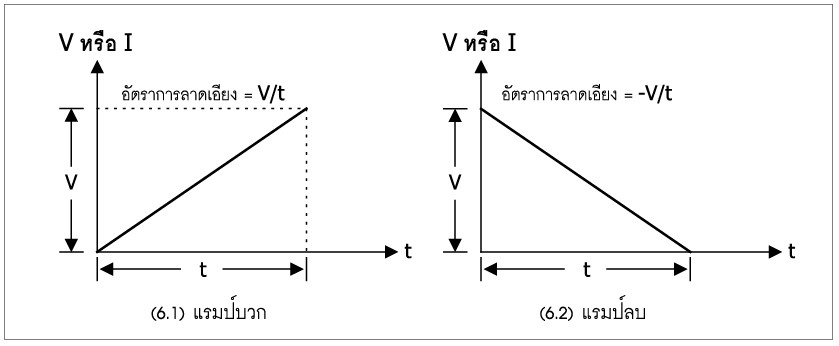
รูปที่ 6 แสดงลักษณะของสัญญาณแรมป์ที่มีความลาดเอียง
สัญญาณสามเหลี่ยมเกิดจากแรมป์บวกและแรมป์ลบที่มีอัตราการลาดเอียงเท่ากัน คาบเวลาของสัญญาณสามารถวัดได้จากยอดของสัญญาณในซีกบวกหรือลบไซเกิลหนึ่งไปยังยอดของสัญญาณในไซเกิลถัดไปดังแสดงในรูปที่ 7

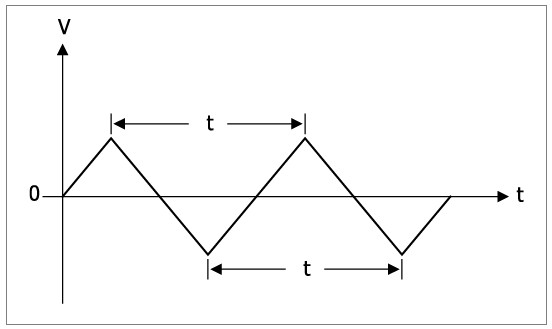
รูปที่ 7 ลักษณะของสัญญาณสามเหลี่ยม
สัญญาณรูปฟันเลื่อย (Sawtooth waveform)
เป็นสัญญาณสามเหลี่ยมรูปแบบพิเศษที่ประกอบด้วยแรมป์ 2 ส่วน โดยแรมป์หนึ่งจะมีอัตราการลาดเอียงมากกว่าอีกแรมป์หนึ่ง ดังแสดงในรูปที่ 8

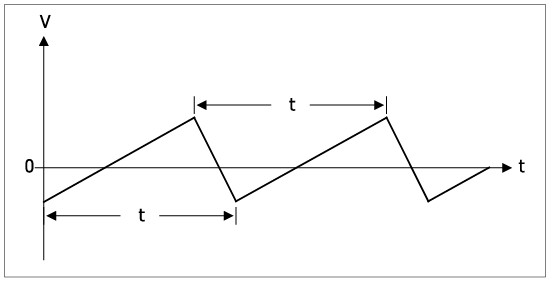
รูปที่ 8 ลักษณะของสัญญาณรูปฟันเลื่อย
ส่วนการวัดหรือคำนวณคาบเวลาของสัญญาณเหมือนกับสัญญาณสามเหลี่ยมทุกประการ
ความรู้พื้นฐานเป็นปัจจัยสำคัญต่อพัฒนาการที่ท้าทายในอนาคตในวันที่มองไปข้างหน้า อย่าลืมทบทวนความรู้เพื่อการตอบให้ได้ทุกคำถามที่ต้องเผชิญ
ขอบคุณข้อมูลจาก บริษัท อินโนเวตีฟ เอ็กเพอริเมนต์ จำกัด