วงจรขยายเสียงที่สร้างด้วยอุปกรณ์พื้นๆ ใช้ไฟเลี้ยงต่ำจากแบตเตอรี่ก้อนเดียวก็ดังได้แถมเกาะติดกับกระแสอีโคด้วยการใช้ไฟเลี้ยงจากพลังงานแสงอาทิตย์
นี่คือวงจรขยายเสียงขนาดเล็ก ที่ไม่ได้เอาไว้ฟังกันเป็นเรื่องเป็นราว แต่มีจุดประสงค์เพื่อเอาไว้ใช้กับงานบางประเภท เช่น ขยายเสียงให้กับไอซีเสียงเพลง วงจรเตือน หรือนำไปทำเป็นอินเตอร์คอม เป็นต้น โดยคุณภาพของมันก็พอฟังได้ อุปกรณ์ที่ใช้ก็เป็นอุปกรณ์พื้นๆ ที่หาได้ในร้านอะไหล่ย่านบ้านหม้อ ที่สำคัญคือ ทำงานที่แรงดันไฟเลี้ยงต่ำครับ เพียง 1.2 ถึง 1.5V หรือจากแบตเตอรี่เพียงก้อนเดียวก็สามารถขยายเสียงได้ ดังนั้นในวงจรขยายที่นำมาเสนอนี้จึงใช้ถ่านไฟฉายเพียงก้อนเดียวเท่านั้นสามารถขับเสียงออกลำโพง 8Ω ได้อย่างสบาย
ยังเท่านี้ยังเท่ไม่พอครับ ต้องเพิ่มลูกเล่นอีกนิด เมื่อวงจรขยายเสียงตัวนี้ใช้ไฟเลี้ยงเพียง +1.5V ก็ดังได้ จึงเกิดแนวคิดต่อยอดไปว่า หากหันมาใช้พลังงานจากธรรมชาติที่มีต้นทุนถูกแถมไม่ต้องเปลี่ยนถ่านเวลาหมด ก็น่าจะดีไม่น้อย จึงนำแผงรับแสงอาทิตย์หรือโซล่าร์เซลมาต่อเข้ากับภาคจ่ายไฟของโครงงานนี้ ก็จะทำให้วงจรขยายเสียงพื้นๆ มีเสน่ห์ชวนฝันขึ้นมาทันตา
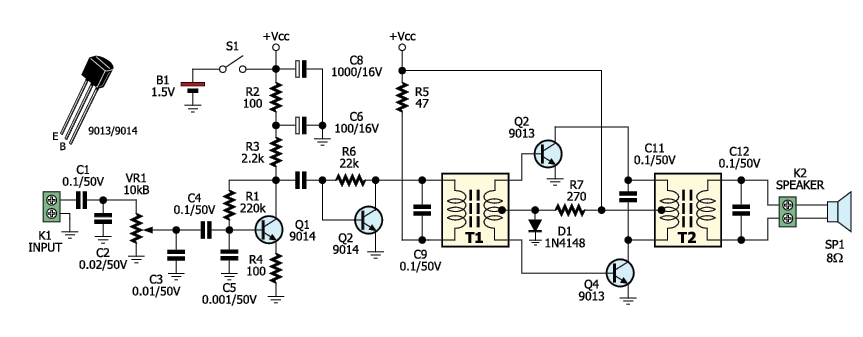
รูปที่ 1 วงจรสมบูรณ์ของ Solar-Junk Amplifier วงจรขยายเสียงที่ใช้แบตเตอรี่ 1.5V เพียงก้อนเดียว
เห็นวงจรทั้งหมดของ Solar-Junk Amplifier ในรูปที่ 1 อย่าได้แปลกใจ เพราะนี่คือ วงจรขยายสัญญาณสุดพื้นฐานและเรียบง่าย สัญญาณที่เข้ามาทางอินพุทจะได้รับการขยายให้แรงขึ้นในขั้นต้นด้วยทรานซิสเตอร์ Q1 เบอร์ 9014 จากนั้นสัญญาณจะได้รับการถ่ายทอดต่อจากขาคอลเล็กเตอร์ของ Q1 ไปยังทรานซิสเตอร์ Q2 ซึ่งทำหน้าที่จัดเฟสให้กับทรานซิสเตอร์ขยายกำลังในภาคสุดท้ายทั้งสองตัวคือ Q3 และ Q4 ผ่านทางหม้อแปลงเอาต์พุต T1 โดยที่ Q3 และ Q4 ถูกจัดการทำงานในแบบพุช-พูล มีตัวต้านทาน R7 และไดโอด D1ทำหน้าที่ไบอัส สัญญาณที่ได้รับการขยายจากทรานซิสเตอร์ทั้งสองตัว สัญญาณจะเกิดการเหนี่ยวนำจากขดปฐมภูมิมาสู่ขดทุติยภูมิของหม้อแปลง T2 เพื่อขับออกลำโพงต่อไป
การใช้หม้อแปลงเอาต์พุตมาใช้ในการจัดเฟสของสัญญาณและใช้ในการคับปลิ้งสัญญาณออกไปยังลำโพง เป็นการใช้งานอุปกรณ์พื้นฐานในการสร้างวงจรขยายเสียงในแบบดั้งเดิม ที่อาจไม่พบแล้วในการออกแบบวงจรขยายเสียงสมัยใหม่
ด้วยการใช้หม้อแปลงเอาต์พุตจึงเป็นปัจจัยสำคัญในการทำให้วงจรขยายเสียงนี้สามารถขับเสียงออกลำโพง 8Ω ได้โดยใช้แรงดันไฟเลี้ยงที่ต่ำมาก นั่นคือ ใช้แบตเตอรี่เพียง 1 ก้อนเป็นแหล่งจ่ายไฟ จะใช้แบบประจุได้หรือแบบอัลคาไลน์ก็ได้ รวมทั้งการนำแผงเซลรับแสงอาทิตย์หรือโซล่าร์เซลมาใช้เป็นแหล่งจ่ายไฟก็ยังไหว
การสร้าง
เนื่องจากนี่คือโครงงานวงจรขยายเสียงที่ใช้หลักการแบบพื้นฐาน การสร้างจึงต้องทำได้ด้วยขั้นตอนพื้นฐานเช่นกัน เริ่มจากจัดหาอุปกรณ์ให้พร้อม อุปกรณ์ทั้งหมดสามารถหาซื้อได้จากร้านขายอะไหล่อิเล็กทรอนิกส์ในย่านบ้านหม้อได้สบายๆ สำหรับทรานซิสเตอร์หากหาเบอร์ตรงไม่ได้ ก็ใช้เบอร์แทนได้ และที่อาจทำให้คนขายอะไหล่ตกใจนิดหน่อยคือ การซื้อหม้อแปลงเอาต์พุต (output transformer) ในยุคสมัยหนึ่งหม้อแปลงแบบนี้ได้รับความนิยมสูงมาก ใช้ในการคับปลิ้งสัญญาณเล็กๆ ให้ขับออกลำโพงได้ดังฟังชัด แต่มาถึงสมัยนี้ การใช้หม้อแปลงแบบนี้ลดลงมาก สำหรับโครงงานนี้มีจุดมุ่งหมายในการนำเสนอพื้นฐานของวงจรขยายเสียง ดังนั้นการจัดหาหม้อแปลงเอาต์พุตนี้จึงเป็นเรื่องสำคัญ
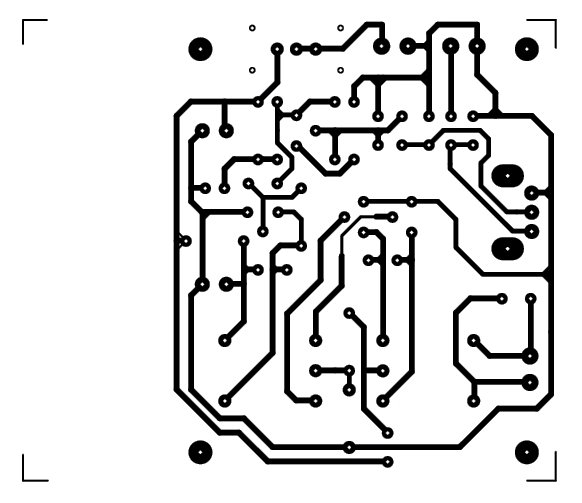
รูปที่ 2 ลายทองแดงของแผ่นวงจรพิมพ์ขนาดเท่าแบบของโครงงาน Solar Junk Amplifier (ดาวน์โหลดลายทองแดงขนาดเท่าจริง )
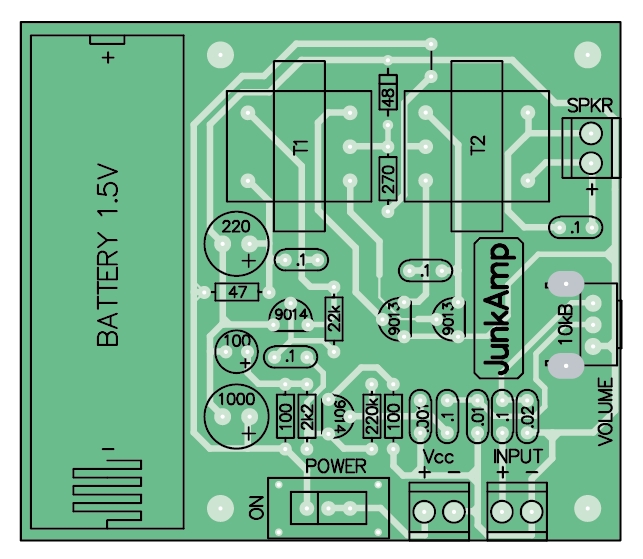
รูปที่ 3 แบบการลงอุปกรณ์บนแผ่นวงจรพิมพ์
จากนั้นทำแผ่นวงจรพิมพ์ตามแบบลายทองแดงในรูปที่ 2 แล้วบัดกรีลงอุปกรณ์ตามแบบในรูปที่ 3 การบัดกรีก็เริ่มจากใส่อุปกรณ์ตัวเตี้ยๆ เช่น ลวดจั๊มเปอร์ที่ได้มาจากเศษขาอุปกรณ์และตัวต้านทานก่อน จากนั้นจึงใส่อุปกรณ์ตัวที่มีความสูงถัดมา ตัวเก็บประจุอิเล็กทรอไลต์และทรานซิสเตอร์ทั้ง 4 ตัวต้องระมัระวังเรื่องขั้วก่อนบัดกรี ต้องติดตั้งให้ถูกต้อง สำหรับหม้อแปลงเอาต์พุตก่อนบัดกรีแนะนำให้ใช้คัตเตอร์ขูดขาทั้งหมดให้สะอาดก่อน มิฉะนั้นอาจจะบัดกรีไม่ติดได้ เพราะที่ขาของมันมีน้ำยาเคลือบอยู่
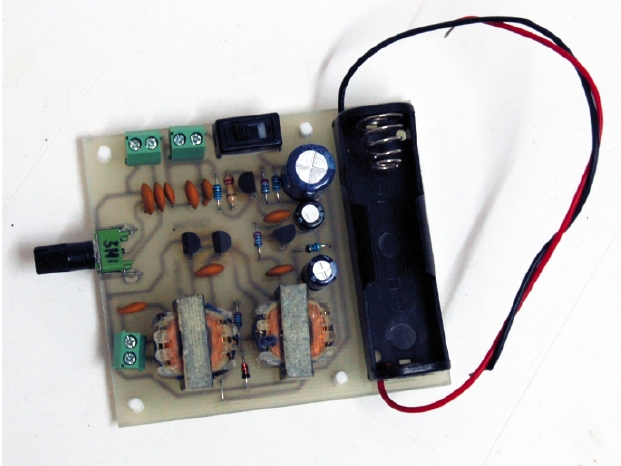
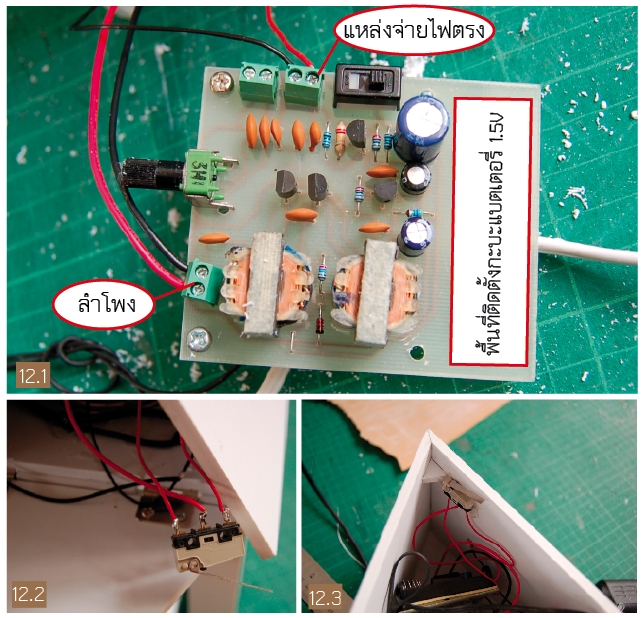
สำหรับหน้าตาของวงจรขยายเสียง Solar-Junk Amplifier ที่ใช้ไฟเลี้ยงต่ำมากหลังจากประกอบเสร็จแล้ว แสดงให้เห็นเป็นประจักษ์ดังรูปที่ 4
ทดสอบวงจรขยายเสียง
เนื่องจากเป็นวงจรขยายเสียง จึงแสดงผลการทดสอบให้เห็นเป็นรูปภาพไม่ได้ ดังนั้นหากอยากรู้ว่า จะขยายเสียงได้ดังแค่ไหน ก็ต้องลงมือทำเองล่ะครับ เพียงต่อแบตเตอรี่ 1 ก้อนเข้าที่จุดต่อ Vcc และต่อลำโพง 8Ω เข้าที่จุดต่อ SPEAKER จากนั้นป้อนสัญญาณเสียงเข้ามาทางอินพุต หากไม่มีอะไรผิดพลาด ต้องได้ยินเสียงที่ดังขึ้นออกจากลำโพง ปรับความดังเบาด้วย VOLUME
วงจรนี้ใช้กระแสไฟฟ้าไม่มาก ดังนั้นแบตเตอรี่ 1 ก้อนจึงใช้งานได้หลายวัน หรือจะขยับงบประมาณอีกหน่อยไปใช้แบตเตอรี่แบบประจุได้ 1.2V ที่จ่ายกระแสไฟฟ้าได้สูง หรือใช้แบตเตอรี่ก้อนใหญ่ SIZE-D ก็ทำได้เลยตามต้องการ
รูปที่4 หน้าตาโครงงาน Junk Amplifier เมื่อประกอบเสร็จแล้ว
การดัดแปลงวงจรเพื่อใช้กับแผงเซลรับแสงอาทิตย์
สำหรับการดัดแปลงให้ใช้กับแผงเซลรับแสงอาทิตย์ได้นั้น อันที่จริงไม่มีอะไรยุ่งยาก นำขั้วบวกลบของแผงเซลรับแสงอาทิตย์มาต่อแทนแบตเตอรี่ได้เลย แต่มันอาจดูไม่ค่อยลงตัวสักเท่าไหร่เพราะต้องวางชุดวงจรทั้งหมดไว้ในที่ๆ มีแสงอาทิตย์จึงจะทำงานได้อย่างเต็มประสิทธิภาพ ดังนั้น
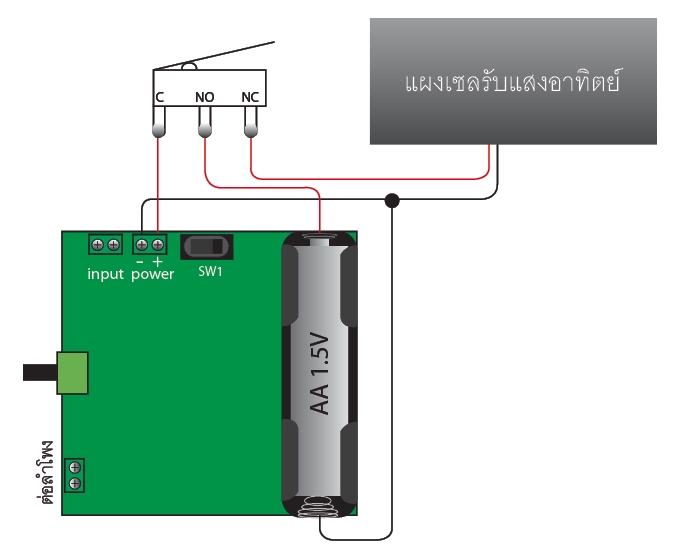
รูปที่ 5 การต่อไมโครสวิตช์สำหรับสลับแหล่งพลังงานระหว่างแบตเตอรี่และเซลรับแสงอาทิตย์
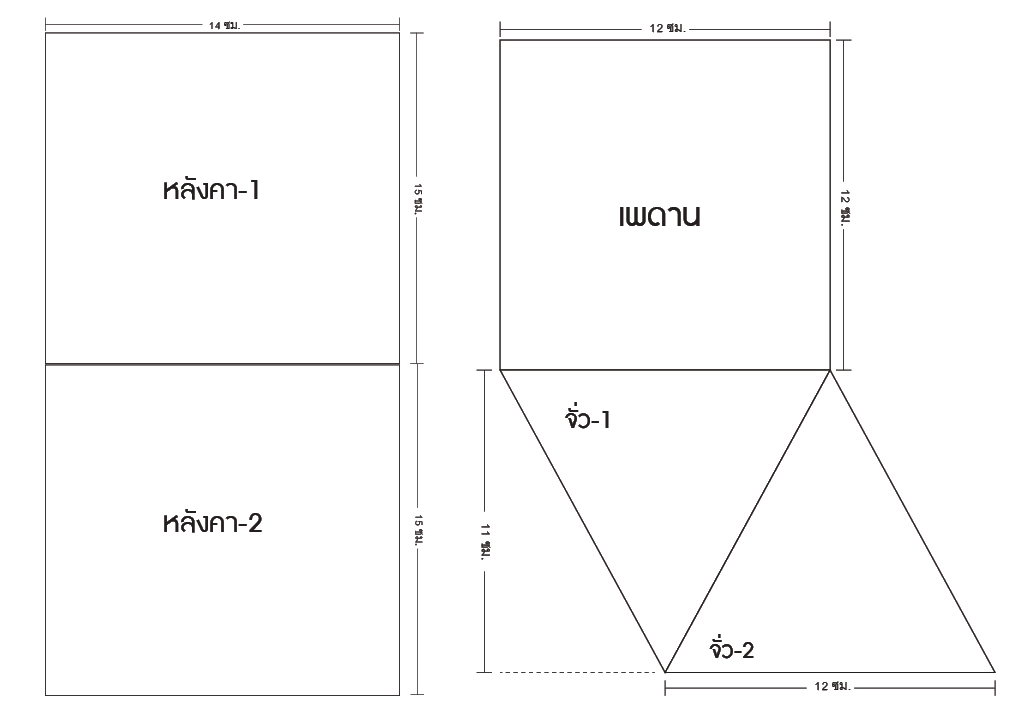
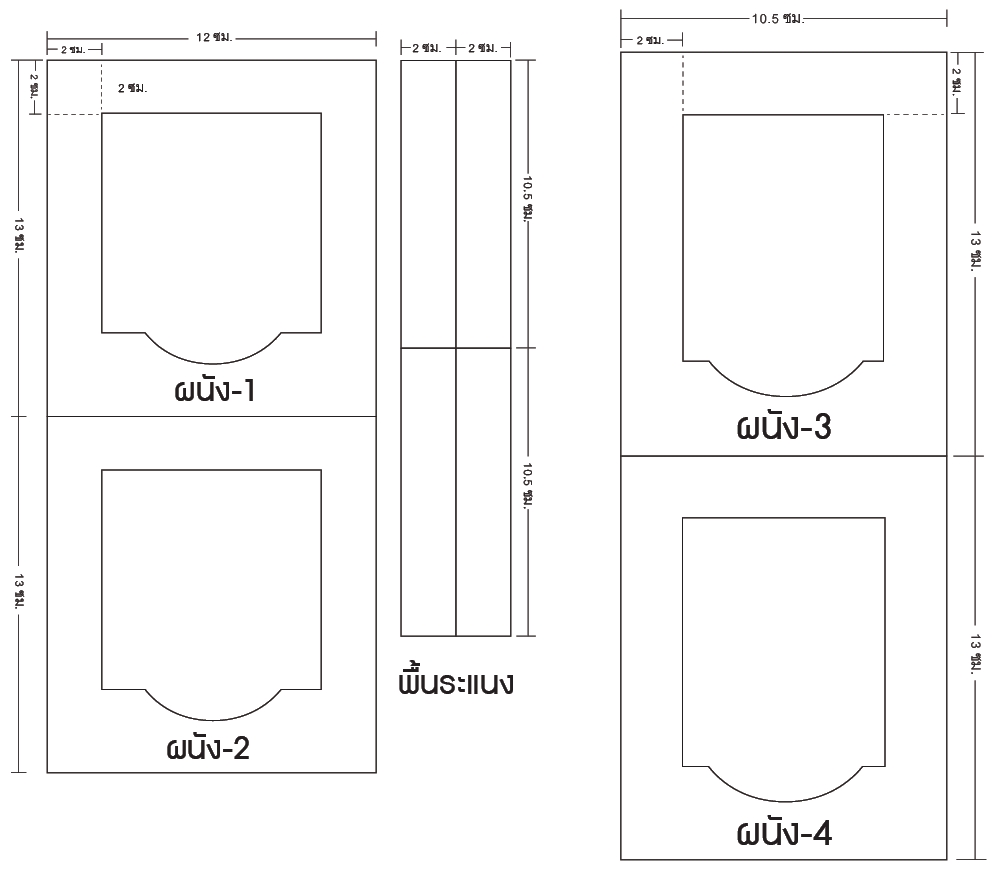
รูปที่ 6 แบบชิ้นส่วนของบ้านต้นไม้ (ดาวน์โหลดขนาดเท่าจริง )
ขั้นตอนการสร้างบ้านต้นไม้
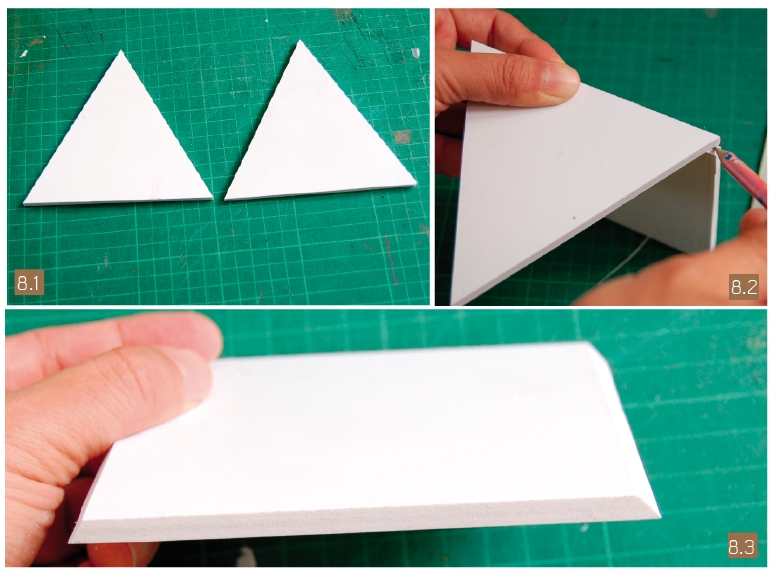
(1) ตัดพลาสวูดหนา 5 มม. ตามแบบในรูปที่ 6 หรือดาวน์โหลดขนาดเท่าจริง
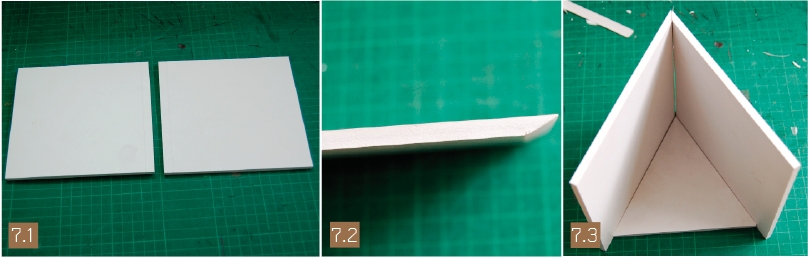
(2) นำแผ่นหลังคา 1 และ 2 มาเฉือนด้านที่มีความกว้าง 14 ซม. 1 ด้าน ให้ได้มุม 120 องศา ทั้งสองแผ่น ดังรูปที่ 7
รูปที่ 7 ลักษณะการเฉือนแผ่นหลังคา
(3) นำแผ่นจั่วมาทาบกับแผ่นเพดานแล้วใช้ดินสอวาดตามมุมเอียงของแผ่นจั่วดังรูปที่ 8 ใช้คัดเตอร์เฉือนตามแนวดินสอจะได้แผ่นเพดานที่มีมุมรับกับแผ่นจั่วดังรูปที่ 8.3
รูปที่ 8 การวัดมุมแผ่นเพดานเพื่อเฉือนให้ได้แนวเอียงที่รับกับแผ่นจั่ว
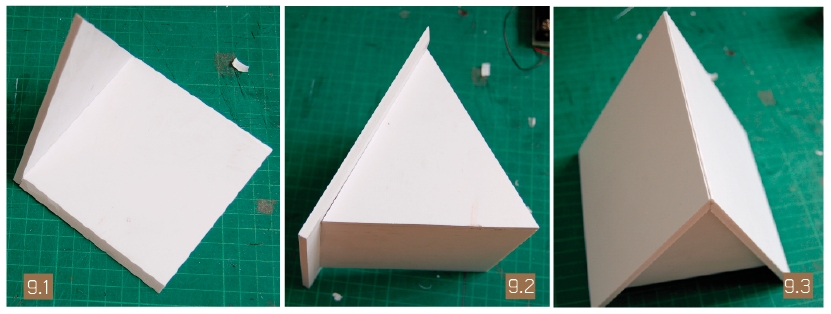
(4) ประกอบแผ่นจั่วเข้ากับแผ่นเพดานด้วยกาวร้อนดังรูปที่ 9.1 จากนั้นนำแผ่นหลังคาทั้ง 2 แผ่นมาประกอบดังรูปที่ 9.3 จะได้ชุดหลังคาที่เราจะนำแผงวงจรมาติดตั้งไว้ด้านใน
รูปที่ 9 การประกอบชุดหลังคา จั่ว และแผ่นเพดาน
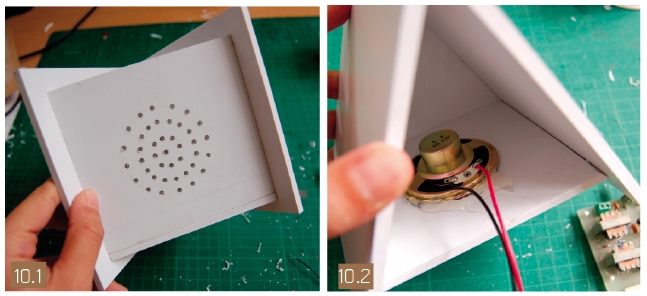
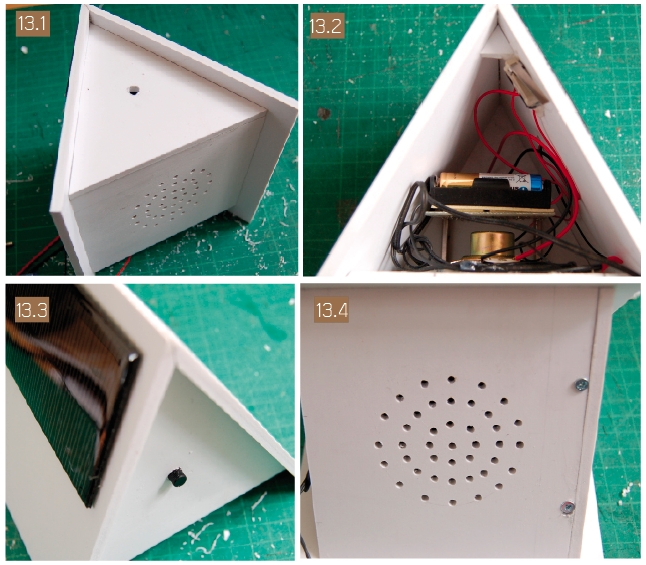
(5) นำลำโพงมาทาบกับแผ่นเพดานแล้วใช้ดินสอวาดตามขอบลำโพง จากนั้นใช้ดอกสว่านขนาด 3 มม. เจาะเป็นช่องให้เสียงออกดังรูปที่ 10.1 แล้วจึงยึดลำโพงไว้ด้านในด้วยปืนยิงกาวดังรูปที่ 10.2
รูปที่ 10 ลักษณะการติดตั้งลำโพง
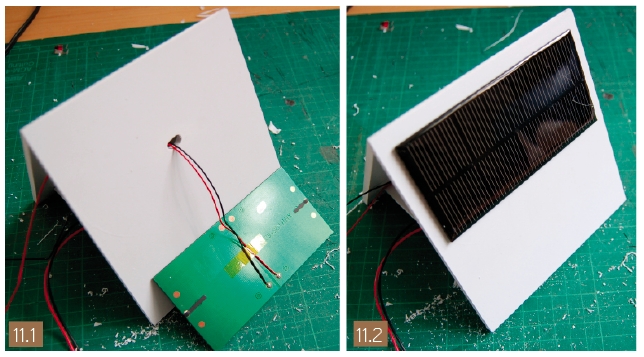
(6) เจาะรูบนแผ่นหลังคาด้านใดก็ได้สอดปลายสายของแผงเซลรับแสงอาทิตย์เข้าไปดังรูปที่ 11.1 จากนั้นยึดแผงเซลรับแสงอาทิตย์ด้วยปืนยิงกาวดังรูปที่ 11.2
รูปที่ 11 ลักษณะการติดตั้งแผงเซลรับแสงอาทิตย์
(7) เชื่อมต่อสายลำโพงและสายไฟเลี้ยงเข้ากับเทอร์มินอลบล็อกของแผงวงจรดังรูปที่ 12.1 ต่อไมโครสวิตช์แบบ 2 ทาง 3 ขาสำหรับสลับระหว่างแผงเซลรับแสงอาทิตย์และแบตเตอรี่ดังรูปที่ 5 สำหรับตัวต้นแบบเลือกใช้ไมโครสวิตช์ติดไว้ที่ด้านในของช่องหลังคาด้วยปืนยิงกาว หากต้องการใช้พลังงานจากแผงโซล่าร์เซลล์ก็ปิดฝาเข้าไปพออยู่ ถ้าหากต้องการใช้พลังงานจากแบตเตอรี่ก็ปิดเข้าไปให้สุดจะทำให้ฝาไปกดก้านสวิตช์เพื่อต่อหน้าสัมผัสที่จุด NO ของไมโครสวิตช์
รูปที่ 12 การติดตั้งไมโครสวิตช์
(8) เจาะรูที่แผ่นจั่วให้ก้านของ VR1 รอดออกมาได้ดังรูปที่ 13.1 จากนั้นติดตั้งแผงวงจรเข้าไปด้านในโดยใช้เสารองโลหะยาว 25 มม. รองแผงวงจรให้สูงกว่าลำโพงดังรูปที่ 13.2 ให้แกนของ VR1 โผล่ออกมาดังรูปที่ 13.3 เจาะรูที่แผ่นเพดานขนาด 3 มม. 2 รู ให้ตรงกับตำแหน่งเสารองโลหะที่รองแผ่นวงจรด้านในแล้วใช้สกรูขนาด 3×10 มม.ขันยึดให้แน่นดังรูปที่ 13.4
รูปที่ 13 การติดตั้งแผงวงจรภายในห้องหลังคา
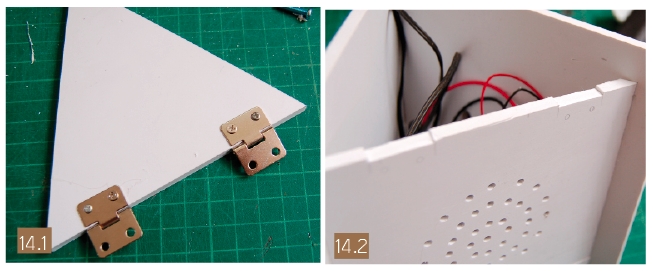
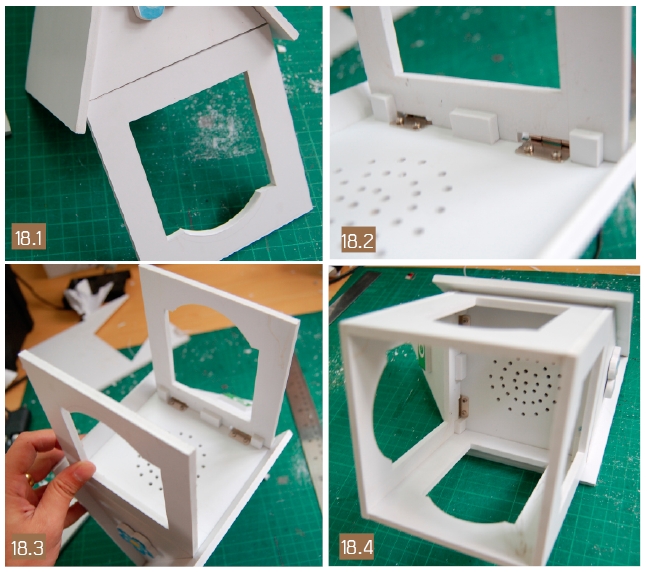
(9) ติดตั้งบานพับที่แผ่นจั่วอีกหนึ่งชิ้นที่ยังไม่ได้ประกอบ ดังรูปที่ 14.1 บากแผ่นเพดานเป็นร่องรองรับบานพับดังรูปที่ 14.2
รูปที่ 14 การติดตั้งบานพับเข้ากับแผ่นจั่วเพื่อทำเป็นฝาเปิดปิดสำหรับเก็บเครื่องเล่น MP3
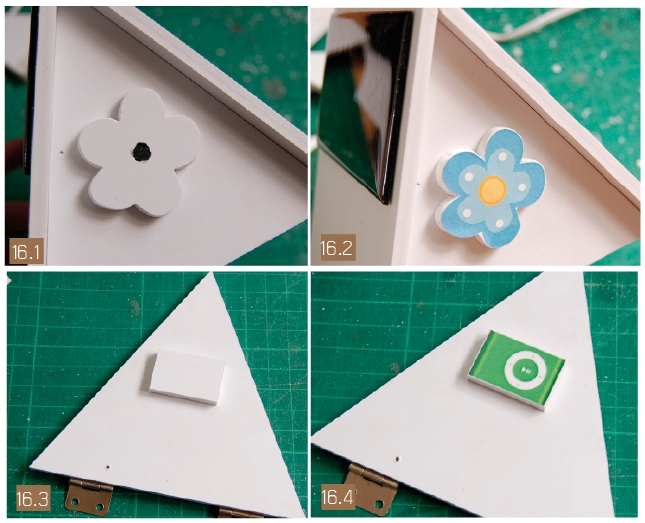
(10) ก่อนจะติดตั้งฝาปิดจากขั้นตอนที่ 9 แนะนำให้ติดตั้งมือจับเสียก่อน โดยออกแบบเป็นรูปทรงเครื่องเล่น MP3 และส่วนปรับระดับความดังเสียงก็ออกแบบเป็นรูปทรงดอกไม้ โดยพิมพ์บนกระดาษสติ๊กเกอร์แล้วตัดให้ได้รูปทรงตามแบบ ตัดพลาสวูดให้มีรูปทรงตามแบบ หรือหากมีฝีมือในการวาดก็สามารถใช้สีอะครีลิกวาดจะดีมากๆ เพราะหากเจอสภาพแวดล้อมนอกบ้านสีจะคงทนกว่าการใช้สติ๊กเกอร์
รูปที่ 15 รูปแบบแป้นปรับระดับเสียงและมือจับแผ่นจั่ว
(11) เจาะรูกลางแผ่นพลาสวูดรูปดอกไม้ขนาดพอดีกับแกนของ VR1 แล้วสวมลงไปดังรูปที่ 16.1 นำภาพดอกไม้แปะลงไปดังรูปที่ 16.2 ส่วนแผ่นจั่วสำหรับเปิดปิดใส่เครื่องเล่น MP3 ให้นำแผ่นพลาสวูดรูปทรงเครื่องเล่น MP3 มาติดด้วยกาวร้อนดังรูปที่ 16.3 แล้วแปะรูปเครื่องเล่น MP3 ลงไป
รูปที่ 16 การติดตั้งแป้นปรับระดับเสียงและมือจับแผ่นจั่ว
(12) นำแผ่นจั่วที่ติดตั้งบานพับแล้วมาประกอบกับแผ่นเพดานด้วยสกรูเกลียวปล่อยขนาด 2 มม. ดังรูปที่ 17
รูปที่ 17 การติดตั้งแผ่นจั่วสำหรับเปิดปิดห้องหลังคา
(13) นำแผ่นผนัง 1, 2, 3 และ 4 มาประกอบเข้ากับด้านล่างของเพดานด้วยกาวร้อนดังรูปที่ 18.1 สำหรับแผ่นผนัง 2 ต้องบากออกเล็กน้อยให้คร่อมบานพับดังรูปที่ 18.2 และเพื่อความแข็งแรงแนะนำให้ตัดเศษพลาสวูดมาเสริมระหว่างรอยต่อดังรูป
รูปที่ 18 การประกอบแผ่นผนัง
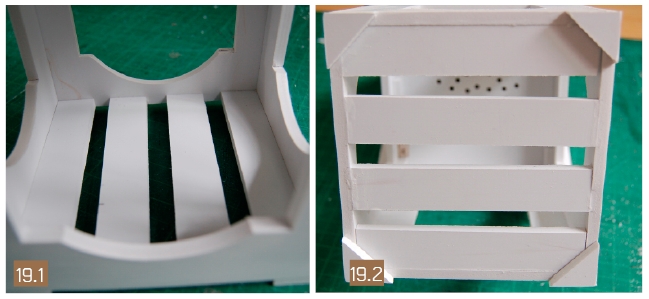
(14) นำแผ่นพื้นระแนงทั้ง 4 ชิ้นมาประกอบกับส่วนล่างของแผ่นผนังด้วยกาวร้อนดังรูปที่ 19.1สุดท้ายตัดเศษพลาสวูดเป็นรูปทรงสามเหลี่ยมมาติดไว้ทั้ง 4 มุม เพื่อทำเป็นขารอง เผื่อนำไปปลูกต้นไม้น้ำจะได้ไหลลงได้สะดวกยิ่งขึ้น
รูปที่ 19 การประกอบแผ่นพื้นระแนง
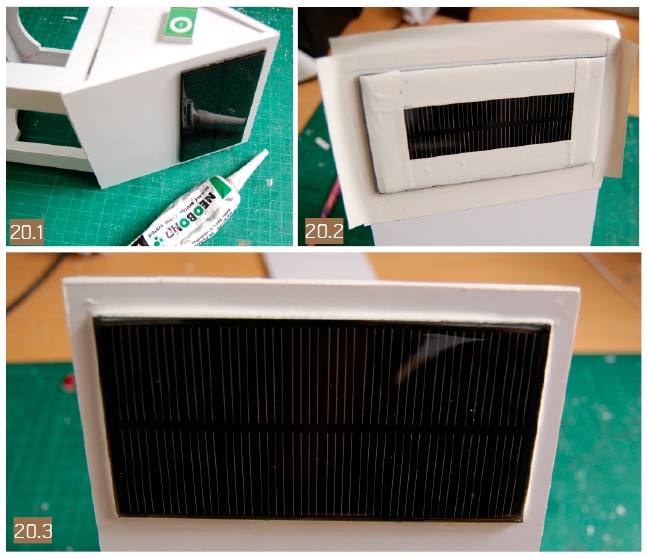
(15) สุดท้ายเป็นขั้นตอนที่ห้ามละเลย ให้นำซิลิโคนมาอุดกันน้ำเข้าตามร่องของแผงเซลรับแสงอาทิตย์ และตามร่องหลังคา โดยใช้เทปพันสายไฟหรือกระดาษกาวปิดส่วนที่ไม่ต้องการให้ซิลิโคนเปื้อนดังรูปที่ 20.2 จากนั้นก็ปาดซิลิโคนลงไปในร่องให้รอบแผง แล้วจึงลอกเทปกาวออกดังรูปที่ 20.3 ปล่อยไว้ให้กาวซิลิโคนแห้งประมาณ 2 ชั่วโมง แล้วนำไปใช้งานได้
รูปที่ 20 การอุดซิลิโคนกันน้ำเข้า
การใช้งาน
เสร็จแล้วครับเครื่องขยายเสียง 2 ระบบ การนำไปใช้งานก็ง่ายมากๆโดยหากต้องการใช้ไฟเลี้ยงจากแผงเซลรับแสงอาทิตย์ก็ให้ปิดฝาหลังในระดับพอดีหรือระดับที่ฝาปิดไม่สัมผัสกับก้านสวิตช์นั่นเอง แต่หากต้องการใช้พลังงานจากแบตเตอรี่ก็ให้ดันฝาหลังเข้าไปจนสุดเพื่อดันก้านไมโครสวิตช์ต่อหน้าสัมผัส NO จากนั้นก็นำไปปลูกไม้ประดับแล้วตั้งไว้ในสวนได้เลย จะเปิดเพลงหรือฟังธรรมะในสวนก็ตามสะดวกครับ
รายการอุปกรณ์ ตัวต้านทาน ขนาด 1/8W 5% หรือ 1% ตัวเก็บประจุ อุปกรณ์สารกึ่งตัวนำ
อื่นๆ
หมายเหตุ
รายการอุปกรณ์สร้างบ้านต้นไม้
หมายเหตุ www.inex.co.th
Solar-Junk Amplifier คือ โครงงานเครื่องขยายเสียงที่ต้องการนำเสนอให้นักเล่นนักทดลองวงจรอิเล็กทรอนิกส์รุ่นใหม่ได้รับทราบถึงการใช้งานอุปกรณ์พื้นฐานในการสร้างเป็นเครื่องขยายเสียง โดยเฉพาะอย่างยิ่งกับการใช้อุปกรณ์อย่างหม้อแปลงเอาต์พุต และที่เป็นจุดเด่นซึ่งเน้นย้ำมาตลอดคือ การใช้แหล่งจ่ายไฟจากแบตเตอรี่เพียงก้อนเดียวสำหรับวงจรขยายเสียงแล้วเป็นเรื่องที่น่าสนใจ และท้าทายนักเล่นโครงงานเครื่องเสียงที่ต้องการใช้ไฟเลี้ยงต่ำที่สุดในการสร้างเครื่องขยายเสียงโดยไม่พึ่งวงจรทวีคูณแรงดันในแบบต่างๆ
Solar-Junk Amplifier ไม่ใช่แอมป์ขยะ แต่มันคือ เครื่องขยายเสียงที่สร้างจากอุปกรณ์ที่ถูกลืม….