มอเตอร์ไฟตรง (DC motor) เป็นอุปกรณ์ที่ทำหน้าที่เปลี่ยนพลังงานไฟฟ้าเป็นพลังงานกล โดยเมื่อจ่ายไฟให้แก่มอเตอร์ จะทำให้แกนของมอเตอร์หมุน จึงสามารถนำการหมุนของแกนมอเตอร์ไปใช้ในการขับเคลื่อนวัตถุให้เกิดการเคลื่อนที่
มอเตอร์ไฟตรงมีขนาดและพิกัดแรงดันให้เลือกใช้มากมาย ในบทความนี้จะเน้นไปที่มอเตอร์ขนาดเล็กที่ใช้แรงดันในย่าน +1.5 ถึง +12V ซึ่งมีการใช้งานในหุ่นยนต์หรือสิ่งประดิษฐ์ที่มีกลไกเคลื่อนไหว ในรูปที่ 1 แสดงหน้าตาของมอเตอร์ไฟตรงในแบบต่างๆ

รูปที่ 1 มอเตอร์ไฟตรงที่มีชุดเฟืองขับในแบบต่างๆ
โดยปกติมอเตอร์ไฟตรงจะถูกสร้างขึ้นให้สามารถหมุนแกนด้วยความเร็วสูงมาก ตั้งแต่ 1,000 รอบขึ้นไป แต่แรงบิดที่ความเร็วรอบสูงมีน้อยมาก จนไม่สามารถนำไปขับกลไกเคลื่อนไหวได้ จึงต้องมีการทดจำนวนรอบด้วยการใช้เฟือง เพื่อให้เกิดแรงบิดมากขึ้น นั่นคือ ยิ่งมีอัตราทดสูงเท่าใด ความเร็วรอบของแกนมอเตอร์จะลดลง แต่จะมีแรงบิดมากขึ้น ดังนั้นการกำหนดอัตราทดที่เหมาะสมจะทำให้สามารถใช้งานมอเตอร์ไฟตรงเพื่อขับเคลื่อนกลไกเคลื่อนที่ได้อย่างมีประสิทธิภาพ
การทำงานของมอเตอร์ไฟตรง
การขับหรือทำให้มอเตอร์ไฟตรงทำงานเพื่อหมุนแกนนั้นง่ายมาก เพียงจ่ายไฟเข้าที่ขั้วของมอเตอร์เท่านั้น และเมื่อกลับขั้วของการจ่ายไฟมอเตอร์ก็จะหมุนกลับทิศทาง สำหรับการอธิบายการทำงานของมอเตอร์โดยทั่วไปจะอ้างถึงมอเตอร์แบบ 2 ขั้ว ดังในรูปที่ 2 เมื่อจ่ายไฟให้แก่มอเตอร์ผ่านทางแปรงสัมผัสซึ่งต่ออยู่กับคอมมิวเตเตอร์และขดลวด เมื่อกระแสไฟฟ้าไหลผ่านขดลวดทำให้เกิดสนามแม่เหล็กขึ้น และเกิดแรงดูดจากแม่เหล็กถาวร ทำให้ขดลวดสามารถหมุนได้ แต่ด้วยการใช้ขดลวดเพียง 2 ขั้ว การหมุนของมอเตอร์จะขาดเสถียรภาพ เพราะในความเป็นจริงเมื่อคอมมิวเตเตอร์หมุนไป 90 องศาจะทำให้เกิดการลัดวงจรคอมมิวเตอร์ทั้ง 2 ชิ้น ทำให้กระแสไฟฟ้าหยุดไหล แต่แกนของมอเตอร์ยังหมุนไปได้ด้วยแรงเฉื่อย ทำให้จังหวะการทำงานนั้นไม่ต่อเนื่อง และทำให้อัตราเร็วในการหมุนไม่คงที่ ซึ่งทางแก้ไขนั้นจะใช้มอเตอร์แบบมีขดลวด 3 ขั้ว ที่มีการพันในทิศทางที่สลับกัน

รูปที่ 2 แสดงส่วนประกอบและการทำงานของมอเตอร์ไฟตรง
ในมอเตอร์ไฟตรงที่ใช้งานจริงนั้น จะเป็นมอเตอร์แบบขดลวด 3 ขั้ว ดังนั้นคอมมิวเตเตอร์ที่ใช้ในการกำหนดจังหวะการจ่ายกระแสให้แก่ขดลวดจะมี 3 ชิ้น ดังแสดงโครงสร้างและการทำงานของมอเตอร์ไฟตรงแบบ 3 ขั้วในรูปที่ 3 ด่วยการใช้ขดลวด 3 ชุดนี้ช่วยให้การหมุนของมอเตอร์มีเสถียรภาพมากขึ้น เพราะแม้ว่าจะเกิดจังหวะที่คอมมิวเตเตอร์ 2 ชิ้นจะถูกลัดวงจร ดังในขั้นตอนที่ 2 และ 4 ของรูปที่ 3 แต่เนื่องจากมีคอมมิวเตเตอร์ 3 ชิ้น เมื่อลัดวงจร 2 ชิ้น ก็เสมือนกับรวมกันเป็นคอมมิวเตเตอร์ 1 ชิ้น จึงสามารถทำงานกับคอมมิวเตเตอร์อีก 1 ชิ้นที่เหลือ เพื่อกำหนดจังหวะการจ่ายกระแสไฟฟ้าต่อไปได้ ทำให้ไม่เกิดภาวะกระแสไฟฟ้าหยุดไหลดังที่เกิดในมอเตอร์แบบขดลวด 2 ขั้ว

รูปที่ 3 แสดงส่วนประกอบและการทำงานของมอเตอร์ไฟตรงแบบขดลวด 3 ขั้ว ซึ่งเป็นแบบที่มีการผลิตใช้งานจริง
วงจรขับมอเตอร์ไฟตรงอย่างง่ายด้วยสวิตช์
แสดงวงจรในรูปที่ 4 ประกอบไปด้วย สวิตช์ 4 ตัว นั่นก็คือ S1, S2, S3 และ S4 ซึ่งในรูปตัวอย่างมอเตอร์จะเคลื่อนที่ทิศทางใด ขึ้นอยู่กับการต่อ สวิตช์ทั้ง 4 ตัว นั่นเอง
ในสภาวะเริ่มต้น ยังไม่มีการเปิดสวิตช์ที่ตัวใดเลย มอเตอร์จึงไม่ทำงาน

รูปที่ 4 หลักการของวงจรขับมอเตอร์ไฟตรงที่ใช้สวิตช์ 4 ตัว
จากวงจรในรูปที่ 4 เปลี่ยนสวิตช์เป็นรีเลย์ 2 ตัว คือ RY1 และ RY2 โดยขั้วบวก (+) ของมอเตอร์ต่อกับขาร่วมของรีเลย์ RY1 และขั้วลบ (-) ของมอเตอร์ต่อกับขาร่วมของรีเลย์ RY2 ส่วนที่ขา NO ของทั้งรีเลย์ RY1 และ RY2 ต่ออยู่กับขั้วบวกของแหล่งจ่ายไฟ +Vm ที่จะจ่ายให้มอเตอร์ และขา NC ของทั้งรีเลย์ RY1 และ RY2 ต่อลงกราวด์ จะได้เป็นวงจรขับมอเตอร์ตามรูปที่ 5.1

รูปที่ 5 วงจรขับมอเตอร์ไฟตรงที่ใช้รีเลย์ 2 ตัวแทนสวิตช์ 4 ตัว
เมื่อจ่ายไฟเพื่อกระตุ้นให้รีเลย์ RY1 ทำงาน จะทำให้หน้าสัมผัสที่ขา NO และ C ของรีเลย์ RY1 ต่อกัน เกิดกระแสไฟฟ้าไหลจาก +Vm เข้าสู่ขั้วบวก (+) ของมอเตอร์ผ่านไปยังขาร่วม (C) ของรีเลย์ RY2 ต่อกับขา NC และลงกราวด์ ทำให้ครบวงจร มอเตอร์จึงทำงานและหมุนในทิศตามเข็มนาฬิกา ดังในรูปที่ 5.2
พิจารณารูปที่ 5.3 เมื่อจ่ายไฟเพื่อกระตุ้นให้รีเลย์ RY2 ทำงาน จะทำให้หน้าสัมผัสที่ขา NO และ C ของรีเลย์ RY2 ต่อกัน เกิดกระแสไฟฟ้าไหลจาก +Vm เข้าสู่ขั้วลบ (-) ของมอเตอร์ผ่านไปยังขาร่วม (C) ของรีเลย์ RY1 ซึ่งต่อกับขา NC และลงกราวด์ ทำให้ครบวงจร มอเตอร์จึงทำงานและหมุนในทิศทวนเข็มนาฬิกา
วงจรขับมอเตอร์แบบ H-Bridge
ลักษณะของวงจรขับมอเตอร์ทั้งในรูปที่ 4 และ 5 มีชื่อเรียกว่า วงจรขับแบบ H-Bridge เนื่องจากลักษณะของวงจรคล้ายกับตัวอักษร H ในภาษาอังกฤษ และมีการใช้อุปกรณ์ควบคุม 4 ตัว นอกจากนั้นยังสามารถใช้ อุปกรณ์ที่เรียกว่า ทรานซิสเตอร์ มาทดแทนรีเลย์ ดังแสดงวงจรในรูปที่ 6 ด้วย การใช้ทรานซิสเตอร์จะทำให้ขนาดของวงจรเล็กลง
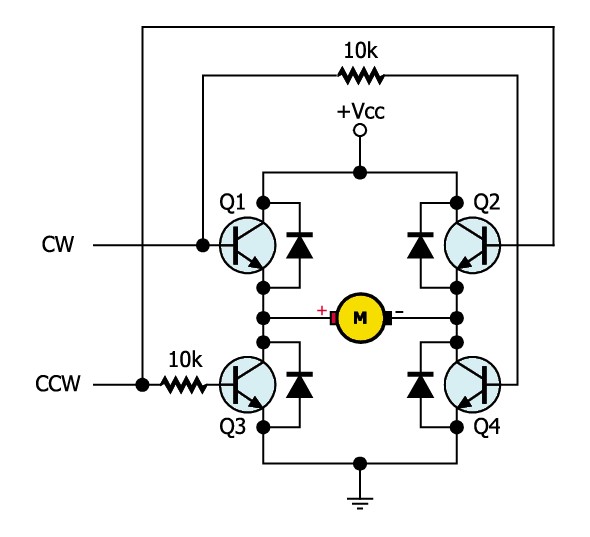
รูปที่ 6 วงจรขับมอเตอร์ไฟตรงแบบ H-Bridge ใช้ทรานซิสเตอร์ 4 ตัว ทำงานแทนสวิตช์และรีเลย์
เมื่อส่งสัญญาณลอจิก “1” มาที่อินพุต CW จะทำให้ทรานซิสเตอร์ Q1 และ Q4 ทำงาน เกิดกระแสไฟฟ้าไหลผ่านมอเตอร์ ทำให้มอเตอร์หมุนในทิศทางตามเข็มนาฬิกา
ถ้าหากส่งสัญญาณลอจิก “1” มาที่อินพุต CCW จะทำให้ทรานซิสเตอร์ Q2 และ Q3 ทำงานแทน เกิดกระแสไฟฟ้าไหลผ่านมอเตอร์ในอีกทิศทางหนึ่ง ทำให้มอเตอร์หมุนในทิศทางทวนเข็มนาฬิกา
นอกจากนั้นยังมีการใช้ไอซีขับมอเตอร์โดยเฉพาะ นั่นคือ ไอซีเบอร์ L293D ซึ่งภายในบรรจุวงจรขับแบบ H-Bridge 2 ชุด จึงทำให้สามารถขับมอเตอร์ไฟตรงได้ 2 ตัว ในรูปที่ 7 เป็นวงจรขับมอเตอร์ที่ใช้ไอซี L293D

รูปที่ 7 วงจรขับมอเตอร์ไฟตรงโดยใช้ไอซี L293D
การขับมอเตอร์แต่ละตัวใช้สายสัญญาณ 3 เส้น เนื่องจากต้องการ ควบคุมทิศทางของมอเตอร์ไปพร้อมๆ กับการควบคุมความเร็วของมอเตอร์ด้วยสัญญาณ PWM สำหรับมอเตอร์ช่องที่ 1 จะใช้อินพุต DIR1A และ DIR1B ในการกำหนดทิศทางการหมุน ส่วนอินพุตรับสัญญาณเพื่อควบคุมความเร็วจะเป็นขา 1E ส่วนมอเตอร์ช่องที่ 2 ใช้อินพุต DIR2A และ DIR2B ส่วนอินพุตควบคุมความเร็วคือขา 2E
การกำหนดเงื่อนไขในการขับมอเตอร์ของ L293D เป็นดังนี้
DIRxA = 0, DIRxB = 1 มอเตอร์หมุนทวนเข็มนาฬิกา
DIRxA = 1, DIRxB = 0 มอเตอร์หมุนตามเข็มนาฬิกา
x คือ 1 หรือ 2
โดยไอซี L293D จะสามารถทำงานได้เมื่อมีสัญญาณลอจิก “1” ส่งมาที่อินพุต 1E สำหรับมอเตอร์ช่อง 1 และ 2E สำหรับมอเตอร์ช่อง 2
ที่เอาต์พุตของวงจรขับมอเตอร์มี LED สองสีแสดงขั้วแรงดันที่จ่าย ให้กับมอเตอร์ ถ้า LED ติดเป็นสีเขียว หมายถึงการจ่ายแรงดันตรงขั้วให้กับมอเตอร์ ถ้าแรงดันที่จ่ายให้กลับขั้ว LED จะติดเป็นสีแดง
ควบคุมความเร็วของมอเตอร์
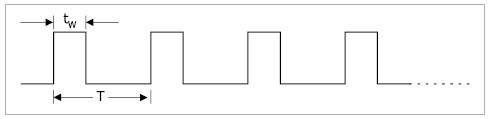
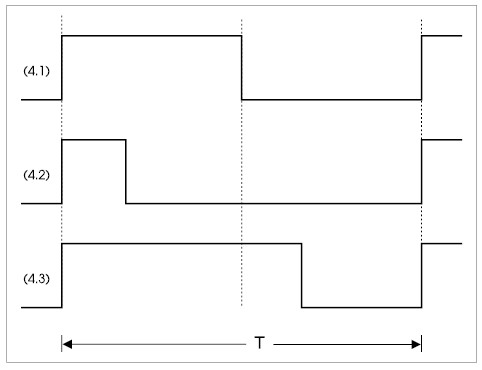
ในการขับมอเตอร์โดยปกติจะป้อนแรงดันไฟตรงให้โดยตรง มอเตอร์จะทำงานเต็มกำลัง ซึ่งอาจมีความเร็วมากเกินไป ดังนั้นการปรับความเร็วของมอเตอร์จึงใช้วิธีลดแรงดันไฟฟ้าที่ป้อนให้กับมอเตอร์ วิธีที่นิยมคือ การป้อนพัลส์ไปขับมอเตอร์แทน แล้วปรับความกว้างพัลส์ช่วงบวก เพื่อให้ได้ค่าแรงดันเฉลี่ยตามต้องการ วิธีการนี้เรียกว่า พัลส์วิดธ์มอดูเลเตอร์ (PWM)

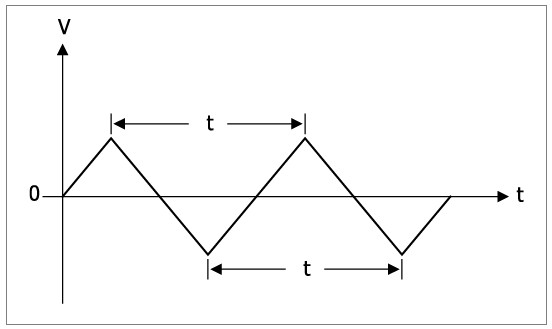
รูปที่ 8 การเปรียบเทียบค่าแรงดันที่เกิดขึ้นเมื่อใช้ PWM
(8.1) ป้อนสัญญาณไฟตรง
(8.2) PWM มีดิวตี้ไซเกิล 50%
(8.3) PWM มีดิวตี้ไซเกิล 75%
(8.4) PWM มีดิวตี้ไซเกิล 25%
โดยความกว้างพัลส์ช่วงบวกเมื่อเทียบกับความกว้างพัลส์ทั้งหมดเรียกว่า ดิวตี้ไซเกิล (duty cycle)โดยจะคิดค่าดิวตี้ไซเกิลเป็นเปอร์เซ็นต์ของค่าความกว้างพัลส์ทั้งหมด ตัวอย่างจากรูปที่ 8.2 มีค่าดิวตี้ไซเกิล 50% หมายถึง ความกว้างของพัลส์ช่วงบวกมีความกว้างเป็น 50% ของความกว้างทั้งหมด ดังนั้นแรงดันเฉลี่ยที่ได้เท่ากับ (50 x 4.8) /100 = 2.4V สำหรับรูปที่ 8.3 และ 8.4 เป็นการกำหนดค่าดิวตี้ไซเกิล 75% และ 25% ตามลำดับ
ตัวอย่างวงจรกำเนิดสัญญาณ PWM สำหรับควบคุมความเร็วมอเตอร์
วงจรสำหรับสร้างสัญญาณพัลส์ PWM เพื่อนำไปขับมอเตอร์ไฟตรงขนาดเล็กนั้นมีตัวอย่างแสดงในรูปที่ 9, 10 และ 11 โดยในรูปที่ 9 เป็นวงจรกำเนิดสัญญาณพัลส์ PWMที่ง่ายที่สุดใช้ไอซี 555 โดยความถี่ของสัญญาณ PWM จะถูกกำหนดด้วยค่าของตัวเก็บประจุ C1 สามารถเปลี่ยนค่าดิวตี้-ไซเกิลหรือความกว้างของพัลส์ได้ด้วยการปรับ VR1 สัญญาณ PWM จะถูกส่งไปยังมอสเฟต Q1 เพื่อขับให้มอเตอร์ไฟตรงหมุน ด้วยการปรับค่าของ VR1 ทำให้แรงดันที่ใช้ขับมอเตอร์มีการเปลี่ยนแปลง ถ้าพัลส์มีความกว้างมาก แรงดันที่ส่งไปขับมอเตอร์ก็จะมากตาม ส่งผลให้ความเร็วของมอเตอร์เพิ่มขึ้น ในทางตรงข้ามถ้าพัลส์มีความกว้างน้อยลง แรงดันเฉลี่ยที่เอาต์พุตก็จะลดลง ความเร็วของมอเตอร์ก็ลดลงตาม

รูปที่ 9 วงจรขับมอเตอร์ไฟตรงด้วยสัญญาณ PWM อย่างง่าย

รูปที่ 10 วงจรควบคุมความเร็วของมอเตอร์ไฟตรงที่ใช้ไอซีออปแอมป์
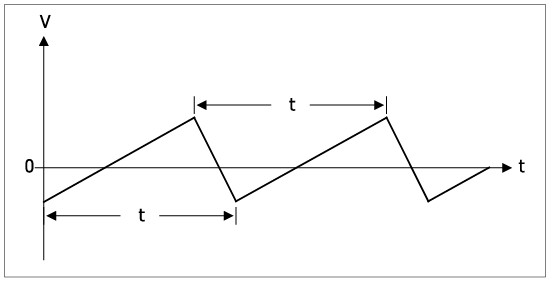
รูปที่ 10 เป็นวงจรควบคุมความเร็วของมอเตอร์ไฟตรง ซึ่งใช้วงจรกำเนิดพัลส์ PWM ที่สร้างขึ้นจากไอซีออปแอมป์ โดย IC1/1 และ IC1/2 ต่อร่วมกับตัวต้านทานและตัวเก็บประจุเพื่อทำงานเป็นวงจรกำเนิดสัญญาณสามเหลี่ยม แล้วส่งมาเปรียบเทียบกับแรงดันที่ได้จากการปรับค่า VR1 ที่ IC1/4 โดยแรงดันจาก VR1 จะผ่านวงจรบัฟเฟอร์ IC1/3 แล้วส่งไปยังอินพุตกลับเฟสของ IC1/4 ส่วนอินพุตไม่กลับเฟสได้รับสัญญาณรูปสามเหลี่ยมมาจาก IC1/2 สัญญาณ PWM จะเกิดจากการเปรียบเทียบแรงดันระหว่างสัญญาณรูปสามเหลี่ยมกับแรงดันที่กำหนดโดยค่า VR1 นั่นคือความกว้างของสัญญาณหรือ ดิวตี้ไซเกิลจะขึ้นการปรับแรงดันที VR1 ส่วนความถี่ของสัญญาณจะขึ้นกับค่าของตัวเก็บประจ C1 สัญญาณ PWM เอาต์พุตจะถูกส่งไปยังมอสเฟต Q1 เพื่อขับมอเตอร์ไฟตรงต่อไป ด้วยวงจร นี้สามารถปรับความเร็วของมอเตอร์ได้จากการปรับค่าความกว้างของสัญญาณพัลส์ที่ VR1

รูปที่ 11 วงจรควบคุมความเร็วของมอเตอร์ไฟตรงที่สามารถปรับค่าดิวตี้ไซเกิลได้เต็มย่าน 0 ถึง 100%
จากวงจรกำเนิดสัญญาณ PWM ในรูปที่ 9 และ 10 จะมีข้อจำกัดที่คล้ายกันข้อหนึ่งคือ ไม่สามารถปรับค่าติวตี้ไซเกิลได้เต็มย่าน 0 ถึง 100% แต่นั่นไม่ได้หมายความว่า วงจรนั้นไม่ดี หากแต่การนำวงจรดังกล่าวไปใช้งานไม่มีความจำเป็นต้องปรับค่าติวดี้ไซเกิลให้ได้เต็มย่าน ยกตัวอย่าง วงจรในรูปที่ 10 เป็นวงจรที่ใช้ปรับความเร็วของมอเตอร์ในรถสกู๊ตเตอร์ ซึ่งในการใช้งานจริงค่าดิวตี้ไซเกิลต่ำมากๆ ไม่มีความจำเป็นต้องใช้ วงจรในรูปที่ 11 เป็นวงจรกำเนิดสัญญาณ PWM ที่สามารถปรับความกว้างของสัญญาณพัลส์หรือค่าดิวตี้ไซเกิลได้เต็มย่าน 0 ถึง 100% หัวใจหลักคือวงจรกำเนิดสัญญาณฟันเลื่อยหรือ Sawtooth generator ซึ่งใช้ไอซีเบอร์ LM555 สัญญาณรูปฟันเลื่อยจะถูกส่งไปเปรียบเทียบที่ออปแอมป์คล้ายกับวงจรในรูปที่ 10 ด้วยการใช้สัญญาณรูปฟันเลื่อยเป็นสัญญาณอ้างอิงทำให้ สามารถปรับค่าดิวตี้ไซเกิลได้ 0 ถึง 100% ความถี่ของสัญญาณได้รับการกำหนดจากการปรับค่า VR1 ร่วมกับค่าของตัวเก็บประจุ C2 ส่วนการปรับค่าดิวตี้ไซเกิลปรับได้ที่ VR2 สัญญาณ PWM เอาต์พุตสามารถนำไปต่อเข้ากับมอสเฟตเหมือนกับวงจรในรูปที่ 9 และ 10 หรือต่อเข้ากับขา EN ของไอซี L293 เพื่อใช้กับวงจรขับมอเตอร์แบบ H-Bridge

รูปที่ 12 วงจรควบคุมความเร็วของมอเตอร์ไฟตรงที่ใช้ไมโครคอนโทรลเลอร์ ในการสร้างสัญญาณ PWM
นอกจากนั้นในวงจรควบคุมมอเตอร์ไฟตรงสมัยใหม่จะใช้ไมโครคอนโทลเลอร์ในการสร้างสัญญาณ PWM เพื่อควบคุมความเร็วของมอเตอร์ และใช้ขาพอร์ตอีก 1 ถึง 2 ขาในการควบคุมทิศทางการหมุนของมอเตอร์ ดังแสดงวงจรตัวอย่างในรูปที่ 12 ด้วยการใช้ไมโครคอนโทรลเลอร์ทำให้วงจรควบคุมความเร็วของมอเตอร์มีขนาดเล็กและลดความซับซ้อนลงอย่างมาก ทั้งยังสามารถกำหนดความกว้างและความถี่ของสัญญาณ PWM ได้ละเอียดมากขึ้น