Dr. Hugh Herr ผู้ดำรงตำแหน่ง CTO หรือ Chief Technology Officer ใน Media Lab ของ MIT เขาคือนักประดิษฐ์ที่พิการขาท่อนล่างทั้งสองข้าง แต่วันนี้เขาสามารถสร้างเท้าเทียมที่ใช้งานได้จริง ไม่ใช่เท้าเทียมที่เป็นแค่รูปหล่อเพื่อค้ำยันเท่านั้น เขาคือเจ้าของเทคโนโลยีที่ชื่อว่า PowerFoot BiOM

ที่นำมาซึ่งสิ่งประดิษฐ์ที่ชื่อว่า iWALK (www.iwalk.com) อันเป็นอุปกรณ์ที่ช่วยให้ความฝันของคนพิการขาที่หวังจะกลับมาเดินได้ด้วยตัวเองอีกครั้งเป็นจริงขึ้นมา
ความสูญเสียที่นำมาซึ่งเป้าหมายที่เด่นชัด
ในวันที่ Hugh Herr ได้รับขาเทียมมาใช้งานเป็นครั้งแรก เขามีอายุ 17 ปี เขาเป็นเพียงนักเรียนมัธยมคนหนึ่งที่อาจยังไม่มีความฝันที่ชัดเจน จนกระทั่งในวันที่เขาต้องใช้ขาเทียม เนื่องจากเขาประสบอุบัติเหตุจากการปีนเขา ทำให้ต้องเสียขาท่อนล่างทั้งสองข้างไป เขาสูญเสียโอกาสในการปีนเขา อันเป็นกิจกรรมที่เขารัก เพราะขาเทียมที่เขาได้รับมาใช้งาน มันเป็นเพียงแค่อุปกรณ์ค้ำยันและช่วยให้เขาไม่ต้องนั่งรถเข็นเท่านั้น มันไม่มีเท้าหรือส่วนประกอบใดๆ ที่ช่วยให้เขาเดินได้
นั่นกลับทำให้เกิดแรงผลักดันอย่างมหาศาล ความฝันของหนุ่มน้อย Herr ปรากฏเด่นชัดขึ้นมาทันที เขาตั้งเป้าหมายในชีวิตไว้อย่างชัดเจนว่า เขาจะต้องประดิษฐ์ขาเทียมที่ทำให้เขาสามารถกลับไปปีนเขาได้อีกครั้ง ทั้งๆ ที่ตอนนั้นเขาไม่ได้มีความพิศมัยในวิชาฟิสิกส์เลยแม้แต่น้อย
เมื่อตั้งใจเช่นนั้น ชีวิตของ Herr ก็เปลี่ยนไปอย่างสิ้นเชิง เขาทุ่มเทต่อการเรียนอย่างสุดตัว จนจบการศึกษาจาก MIT (Massachusetts Institue of Technology) และได้ปริญญาเอกจากมหาวิทยาลัย Harvard จากนั้นเข้าทำงานใน Media Lab ของ MIT กับแผนกวิทยาศาสตร์สุขภาพและเทคโนโลยีอันเป็นโครงการร่วมระหว่าง Harvard และ MIT นั่นจึงทำให้เขาสามารถเดินตามความฝันของเขาในการสร้างขาเทียมที่จะช่วยให้เขากลับมาไม่เพียงแต่เดิน เขายังต้องการกลับมาปีนเขาให้ได้อีกครั้ง
PowerFoot BiOM คือคำตอบ
Herr สามารถค้นคิดเทคโนโลยีที่ชื่อว่า PowerFoot BiOM มันเป็นระบบชีวอิเล็กทรอนิกส์สำหรับควบคุมการทำงานของท่อนขาช่วงล่าง ตั้งแต่ใต้เข่าลงไปจนถึงฝ่าเท้า โดยมันเข้ามาแทนที่การใช้โครงข่ายกล้ามเนื้อเทียมที่มีข้อด้อยในการไม่สามารถรับรู้แรงกดที่กระทำลงบนฝ่าเท่าในขณะเดินได้จริง จึงทำให้การเดินไม่เป็นธรรมชาติอย่างแท้จริง
อาจกล่าวได้ว่า PowerFoot BiOM คือ กลไกอัตโนมัติของท่อนขาที่ช่วงล่างที่ได้รับพลังงานมาจากการงอของฝ่าเท้า อันเกิดจากการขยับข้อเท้า เอ็นร้อยหวายและกล้ามเนื้อน่องในขณะที่ขาขยับเพื่อเคลื่อนที่ไปข้างหน้า ทำให้กลไกสามารถทำงานอย่างมีพละกำลังมากพอเพื่อที่จะรองรับการใช้ขาในการเดิน วิ่ง และปีน ตรงนี้เองคือจุดที่โดดเด่นและแตกต่างไปจากการใช้โครงข่ายกล้ามเนื้อเทียมที่ไม่สามารถให้พลังงานหรือกำลังมากพอ
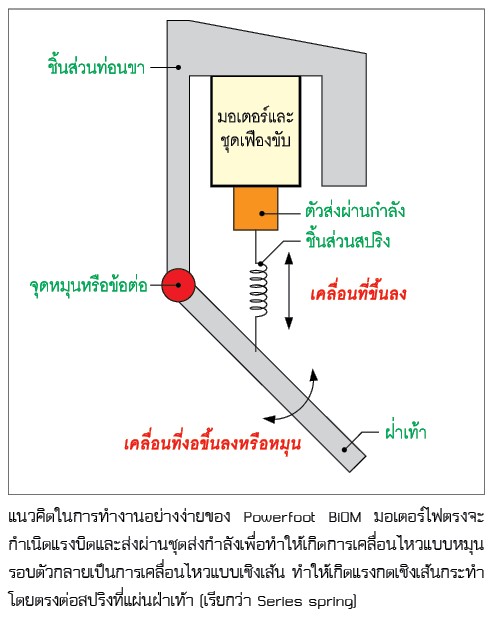
PowerFoot BiOM ทำงานอย่างไร ?
PowerFoot BiOM จะตรวจจับตำแหน่งของข้อเท้าในเวลาจริงเพื่อทำการตอบสนองต่อกิจกรรมที่เกิดขึ้น ณ เวลานั้นๆ โดยมีจุดตรวจจับมากถึง 250 จุดต่อการทำงานในแต่ละจังหวะ ตัวตรวจจับที่ใช้คือ Accellerometer sensor หรือตัวตรวจจับความเร่ง ด้วยการใช้ตัวตรวจจับแบบนี้ทำให้ทราบถึงทิศทาง ความเร็ว และความเร่งที่เกิดขึ้น จากนั้นระบบจะทำการประมวลผลจากข้อมูลที่ตัวตรววจจับส่งมาเพื่อส่งสัญญาณไปควบคุมอุปกรณ์ทางกลที่ใช้ในการเคลื่อนที่ของขาเทียมทั้งหมด ให้ตอบสนองต่อความต้องการของผู้ใช้งาน
ระบบจะทำการควบคุมสปริงให้ท่อนขา (เทียม) มีการขยับขึ้นลงตามการเคลื่อนไหวที่กำหนดมา เพื่อไปยังเป้าหมายที่ต้องการ เมื่อสิ้นสุดการทำงานในแต่ละจังหวะ สปริงจะมีการคืนตัวเพื่อทำการสะสมพลังงาน เพื่อรองรับการเคลื่อนไหวในรอบต่อไป
จาก PowerFoot BiOM สู่ iWALK
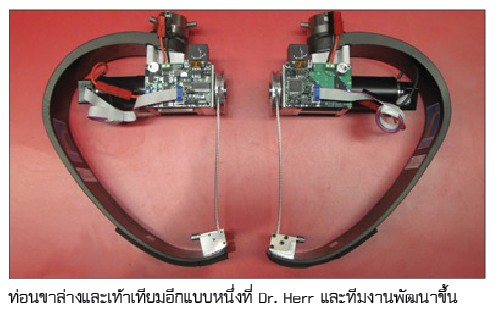
หลังจาก Herr สามารถพัฒนา PowerFoot BiOM ได้สำเร็จ จึงมีการจัดตั้งบริษัทขึ้นมาเพื่อดูแลผลประโยชน์ของนวัตกรรมนี้ และเขาได้ตั้งชื่อสิ่งประดิษฐ์อันทรงคุณค่านี้ว่า iWALK (www.iwalkpro.com) แน่นอนชื่อบริษัทที่เขาตั้งขึ้นต้องมีชื่อเดียวกันกับสิ่งประดิษฐ์ตัวนี้
iWALK มีคุณสมบัติเด่นที่สำคัญดังนี้
• น้ำหนักเพียง 4.5 ปอนด์ หรือประมาณ 2.2 กิโลกรัม
• ความสูงหรือความยาวของแข้ง 8.25 นิ้ว อันเป็นค่าความยาวเฉลี่ยของแข้งมนุษย์
• ช่วยให้ผู้ใช้งานสามารถเดินและวิ่งบนพื้นผิวต่างๆ ได้ รวมถึงกระโดด
• ใช้แบตเตอรี่ชนิดลิเธียมโพลีเมอร์แบบประจุได้เร็ว อายุการใช้งาน
• มีตัวตรวจจับที่รองรับถึง 6 มุมการเคลื่อนที่อิสระ (DOF : Degree Of Freedom) รวมถึงมีการทำงานที่สัมพันธ์กันระหว่างการตรวจจับแรงกด แรงบิด และมุมในการเคลื่อนที่
• มีระบบตรวจจับและประมวลผลการทำงานในแบบเวลาจริง จึงลดความเสี่ยงในการล้มลงของผู้ใช้งาน ไม่ว่าจะเคลื่อนที่บนพื้นผิวแบบใด รวมถึงการขึ้นบันไดและการกระโดด
• มีความสามารถในการจัดการพลังงานเพื่อรองรับการก้าวเดินอย่างมีประสิทธิภาพ ช่วยลดอาการปวดกล้ามเนื้อและความเมื่อยล้า ทำให้ผู้ใช้งานสามารถเดินได้อย่างต่อเนื่อง
• iWALK สามารถให้กำลังมากถึง 400 วัตต์ต่อการเคลื่อนที่ในหนึ่งจังหวะ
• มีระบบลดแรงสะเทือนที่ดีเพียงพอ เพื่อช่วยลดผลกระทบต่อท่อน
ขาด้านบนและสะโพก และยังช่วยไม่ให้มีอาการปวดหลังเมื่อเปรียบเทียบกับอุปกรณ์ช่วยเดินหรือขาเทียมในแบบอื่นๆ
• เป็นอุปกรณ์ที่ช่วยพัฒนาคุณภาพชีวิตของผู้พิการได้เป็นอย่างดี เพราะช่วยให้ผู้พิการสามารถช่วยเหลือตัวเองได้ โดยเฉพาะอย่างยิ่งในการเคลื่อนที่หรือเดินทางสัญจรไปในที่ต่างๆ
• iWALK จะพัฒนาระบบควบคุมเท้าและขาเทียมสำหรับแต่ละบุคคลเป็นการเฉพาะเจาะจง เพื่อรองรับการใช้ชีวิตที่แตกต่างกันไป
• ใช้สปริงแบบอีลาสติกที่ให้พลังงานสูง รวมถึงอุปกรณ์ขับเคลื่อนที่รองรับกับพลังงานที่ได้จากการงอฝ่าเท้า
นวัตกรรมนำไปสู่การพัฒนาคุณภาพชีวิต
จากประสบการณ์ตรงของ Dr. Hugh Herr ทำให้เขามีแรงผลักดันอย่างมหาศาลในการพัฒนา iWALK เพื่อช่วยตอบสนองทั้งความต้องการส่วนตัวและช่วยให้ผู้พิการท่อนขาช่วงล่างได้มีโอกาสกลับมาใช้ชีวิตตามปกติได้
วันนี้ iWALK ได้ช่วยให้วีรบุรุษจากสงครามของสหรัฐอเมริกาผู้สูญเสียขาได้กลับมามีขาเพื่อเดินและวิ่งอย่างคล่องตัว
iWALK ช่วยให้นักกรีฑาที่ประสบอุบัติเหตุจนต้องตัดขาทิ้งได้มีโอกาสกลับสู่ลู่วิ่งที่เขารักอีกครั้ง
iWALK ช่วยให้ Dr. Herr ได้กลับไปสนุกกับชีวิตด้วยการปีนเขาได้อีกครั้ง เขาสามารถพิชิตเขาลูกแล้วลูกเล่าอย่างมั่นใจ
Dr. Herr ได้ให้คำจำกัดความที่ลึกซึ้งเกี่ยวกับ iWALK เท้าเทียมอัจฉริยะของเขาว่า ” I don’t walk my legs. My legs walk me.”